- 全部分类/
- 科学普及/
- 物联网技术
 扫码免费借阅
扫码免费借阅
目录
快速导航-
资讯博览 | 视点
资讯博览 | 视点
-
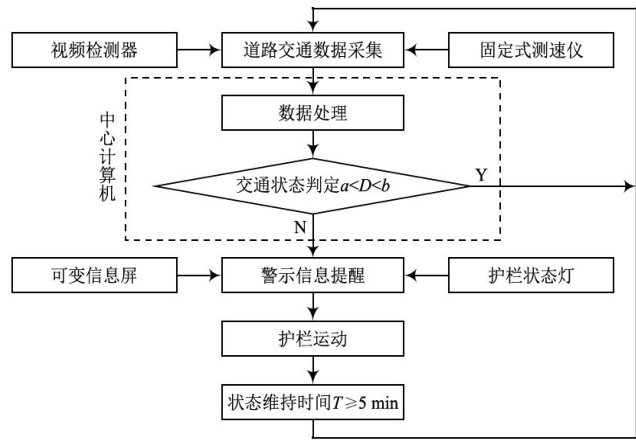
资讯博览 | 基于交通流状态判别的城市道路智能分隔护栏
资讯博览 | 基于交通流状态判别的城市道路智能分隔护栏
-
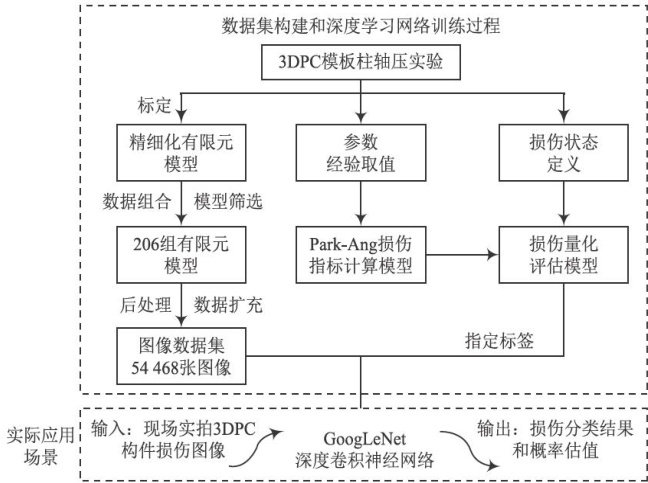
学术研究 | 计算机视觉辅助下三维细观的3DPC模板柱损伤量化评估与检测方法研究
学术研究 | 计算机视觉辅助下三维细观的3DPC模板柱损伤量化评估与检测方法研究
-
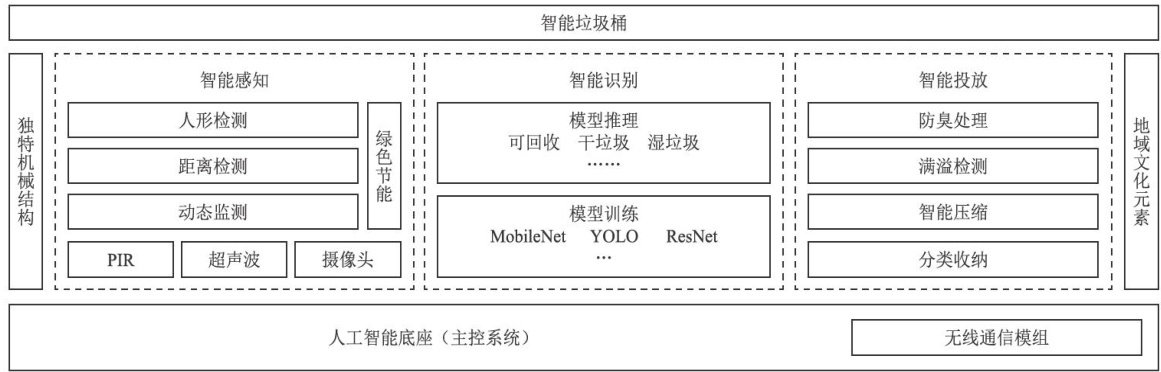
学术研究 | 融合多模态感知与自适应交互的文旅场景智能垃圾桶设计研究
学术研究 | 融合多模态感知与自适应交互的文旅场景智能垃圾桶设计研究
-
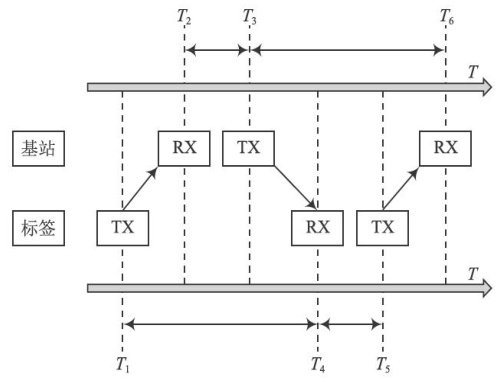
学术研究 | 多基站协同的UWB仓储货物定位系统设计与实现
学术研究 | 多基站协同的UWB仓储货物定位系统设计与实现
-
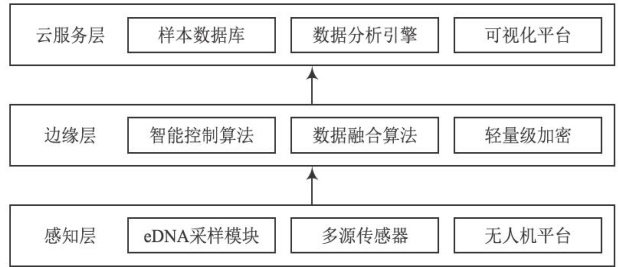
学术研究 | 基于边缘智能的无人机空气环境DNA采样与防污染信息化系统研究
学术研究 | 基于边缘智能的无人机空气环境DNA采样与防污染信息化系统研究
-
学术研究 | 基于BLE技术的消防员生命体征监测系统研究与设计
学术研究 | 基于BLE技术的消防员生命体征监测系统研究与设计
-
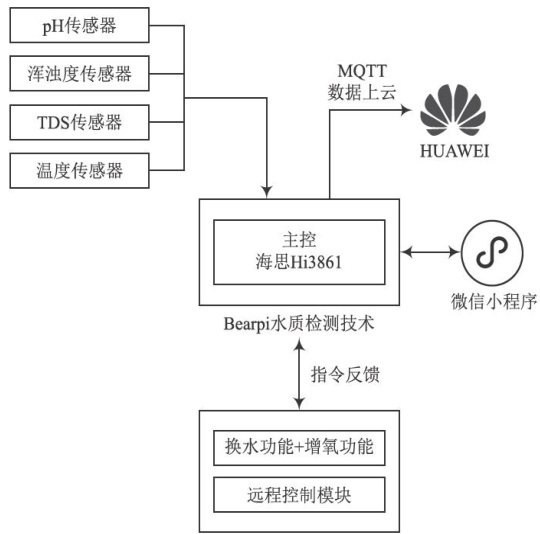
学术研究 | 基于Hi3861的水质云边协同监测系统设计
学术研究 | 基于Hi3861的水质云边协同监测系统设计
-
学术研究 | 基于物联网技术藏羊肉冷链物流监测系统的设计
学术研究 | 基于物联网技术藏羊肉冷链物流监测系统的设计
-
学术研究 | 面向多场景的智能探测机器人环境监测系统设计与应用
学术研究 | 面向多场景的智能探测机器人环境监测系统设计与应用
-
学术研究 | 基于STM32的便携式空气质量检测系统设计
学术研究 | 基于STM32的便携式空气质量检测系统设计
-
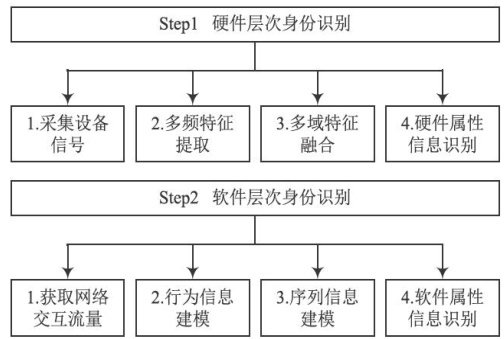
学术研究 | 基于指纹特征的物联网设备识别技术研究
学术研究 | 基于指纹特征的物联网设备识别技术研究
-
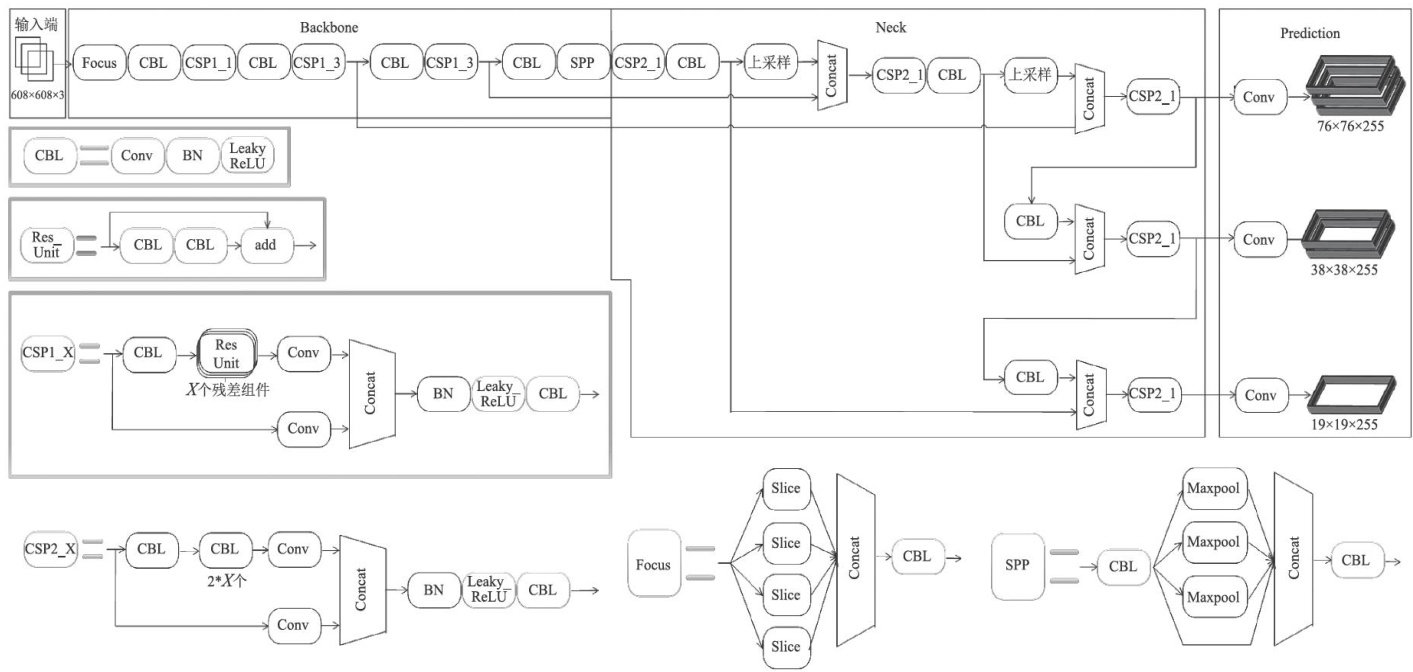
学术研究 | 基于YOLOv11n模型的智能渔业监测系统设计与实现
学术研究 | 基于YOLOv11n模型的智能渔业监测系统设计与实现
-
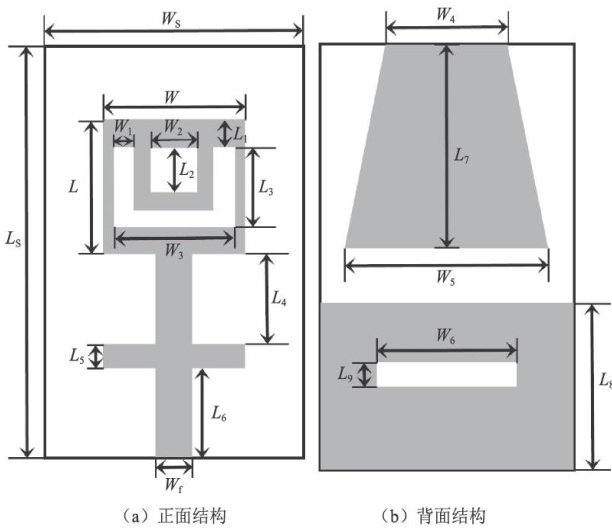
学术研究 | 一款小型化宽频微带天线的设计与仿真
学术研究 | 一款小型化宽频微带天线的设计与仿真
-
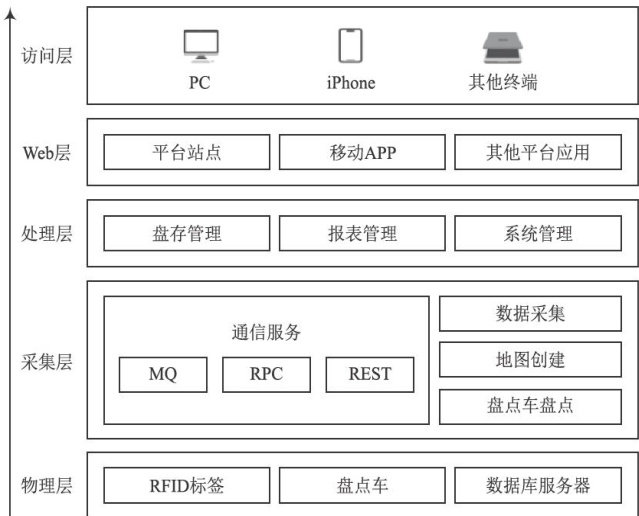
学术研究 | 基于高频RFID的智能仓储盘点管理系统
学术研究 | 基于高频RFID的智能仓储盘点管理系统
-
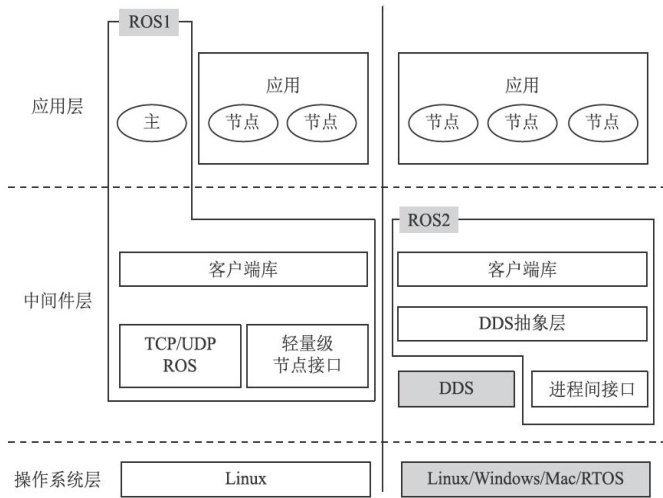
学术研究 | 基于ROS1的分布式实时数据分发实现
学术研究 | 基于ROS1的分布式实时数据分发实现
-
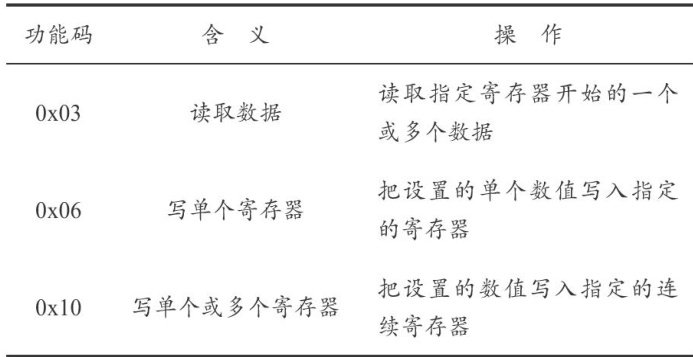
学术研究 | Modbus协议在电池检测系统中的应用
学术研究 | Modbus协议在电池检测系统中的应用
-
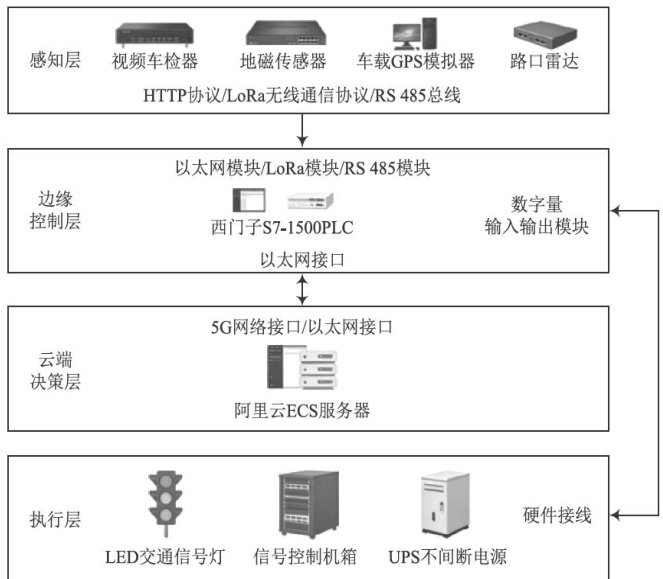
学术研究 | 区域交通信号多源物联网数据协同控制研究
学术研究 | 区域交通信号多源物联网数据协同控制研究
-
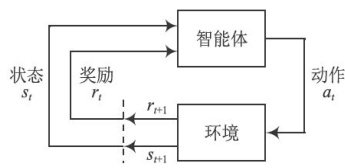
学术研究 | 基于改进强化学习的线性缓冲区车辆调度优化方法研究
学术研究 | 基于改进强化学习的线性缓冲区车辆调度优化方法研究
-

学术研究 | 基于JPS-DWA融合算法的动态路径规划研究
学术研究 | 基于JPS-DWA融合算法的动态路径规划研究
-
学术研究 | 基于改进nnU-Net的医学图像分割算法
学术研究 | 基于改进nnU-Net的医学图像分割算法
-
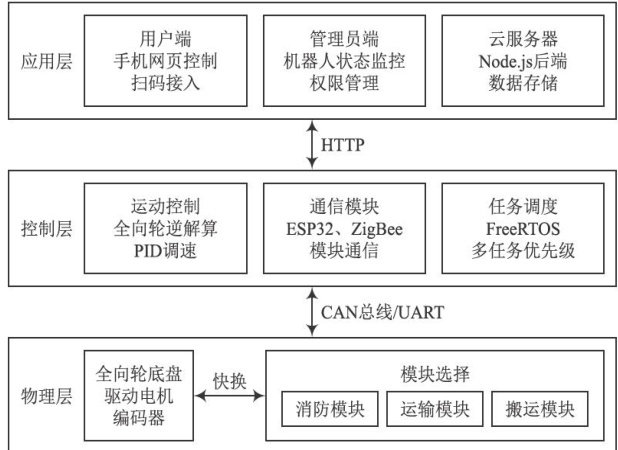
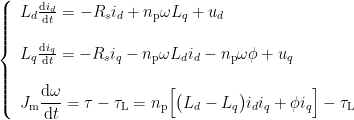
学术研究 | 基于模块化全向轮平台的多功能联网机器人设计
学术研究 | 基于模块化全向轮平台的多功能联网机器人设计
-

学术研究 | 基于广义AGD + 框架的LASSO稀疏恢复研究
学术研究 | 基于广义AGD + 框架的LASSO稀疏恢复研究
-
学术研究 | PMSM反馈线性化与状态误差PCH协调控制
学术研究 | PMSM反馈线性化与状态误差PCH协调控制
-
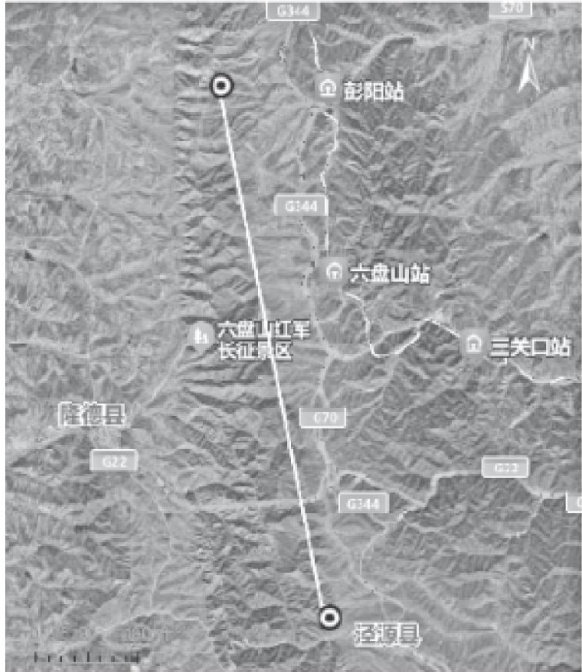
学术研究 | 地形对山地气象场的调控机制与预测研究
学术研究 | 地形对山地气象场的调控机制与预测研究
-
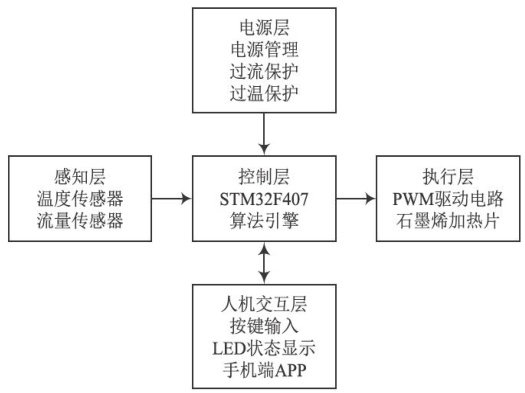
学术研究 | 基于PWM的WiFi智能恒温口罩设计
学术研究 | 基于PWM的WiFi智能恒温口罩设计
-
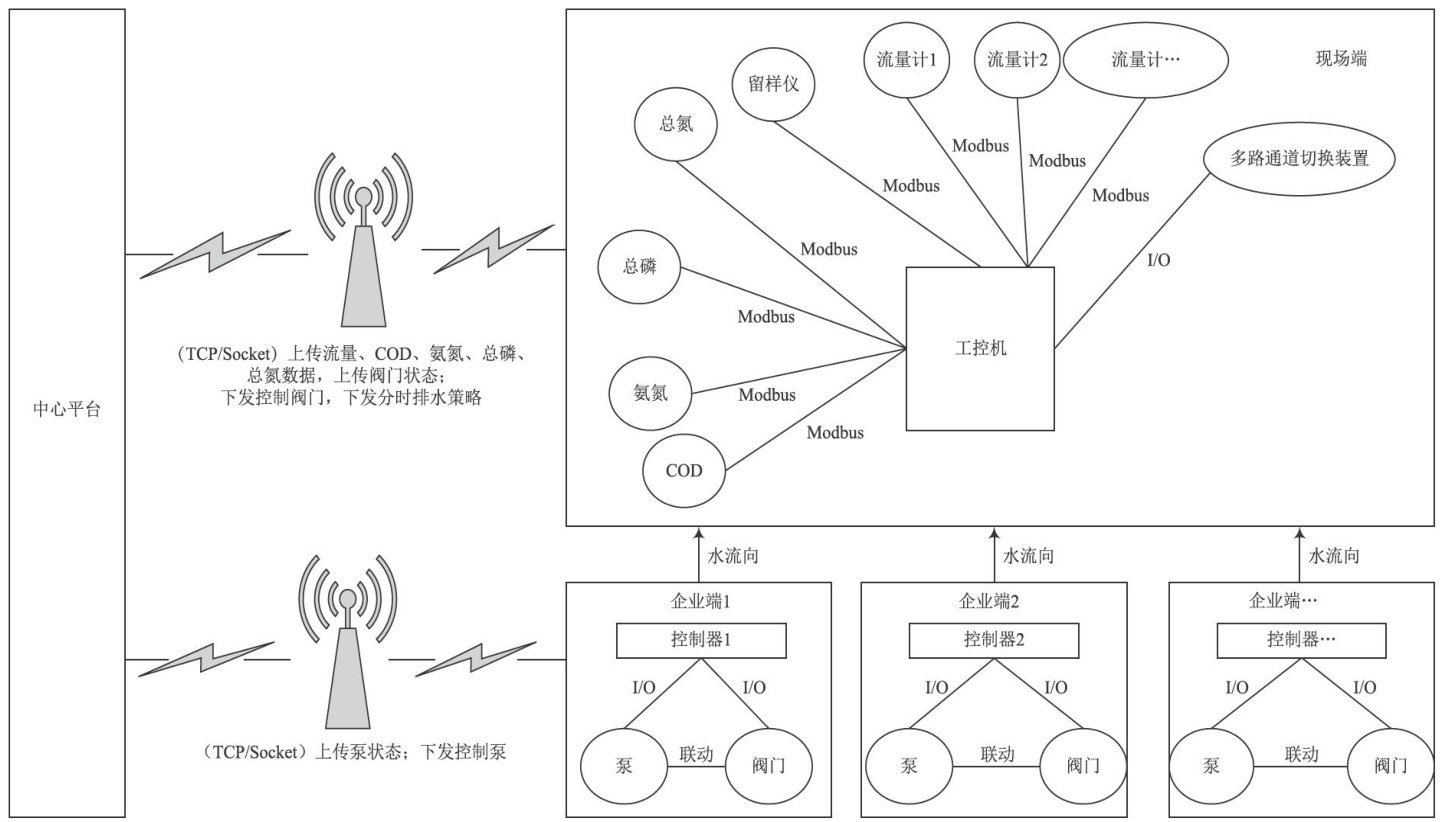
学术研究 | 基于分时排水与一机多测的园区污水排放监控管理系统
学术研究 | 基于分时排水与一机多测的园区污水排放监控管理系统
-
学术研究 | 基于ROS的校园无人清扫车实验平台设计
学术研究 | 基于ROS的校园无人清扫车实验平台设计
-
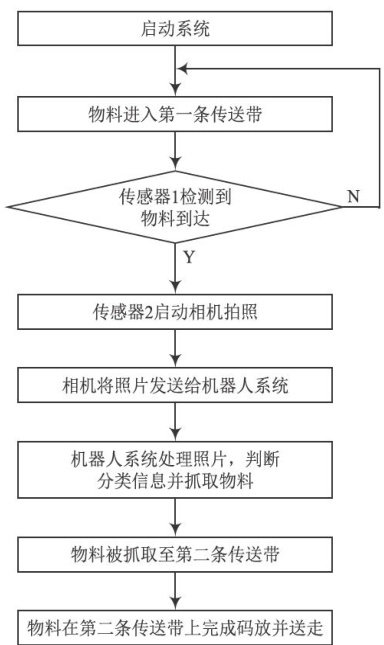
学术研究 | 基于RobotStudio的机器人物料分拣工作站仿真设计
学术研究 | 基于RobotStudio的机器人物料分拣工作站仿真设计
-
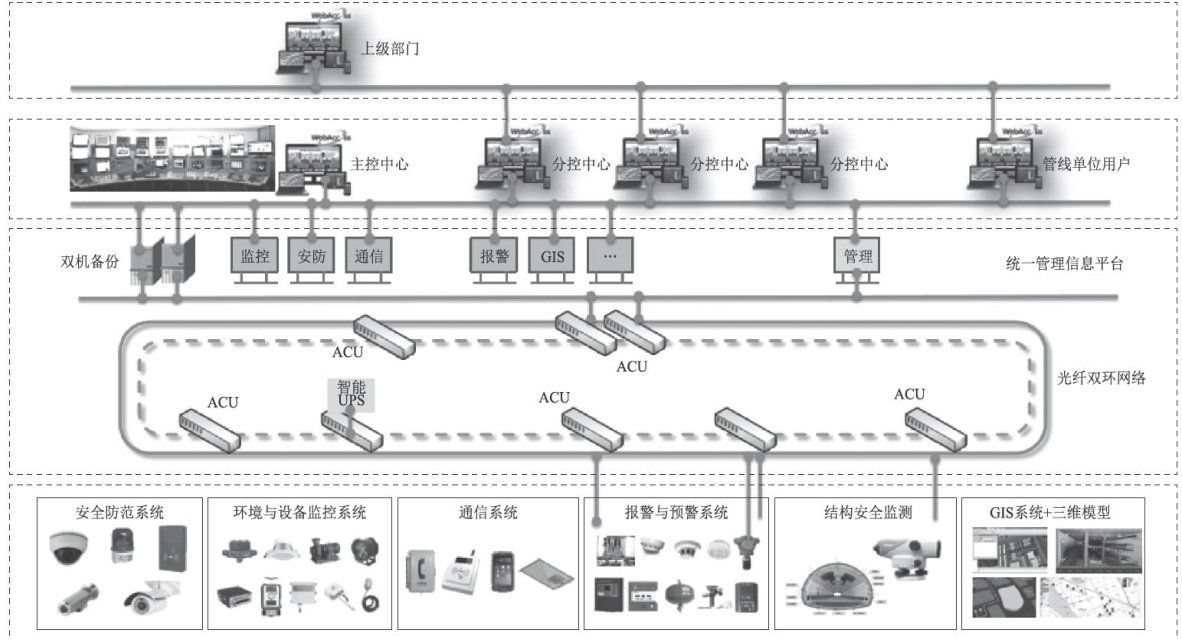
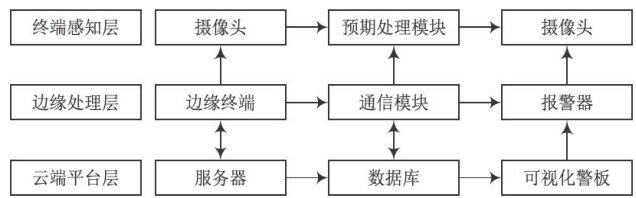
学术研究 | 智能化管廊安防系统的实时监控与数据融合方法
学术研究 | 智能化管廊安防系统的实时监控与数据融合方法
-

学术研究 | 基于空频动态融合与多路径依赖感知的图像字幕生成
学术研究 | 基于空频动态融合与多路径依赖感知的图像字幕生成
-
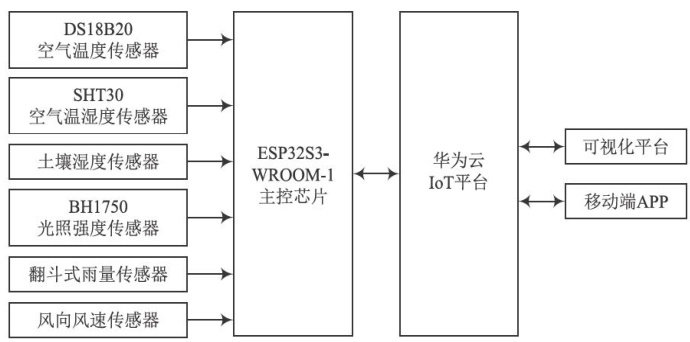
学术研究 | 基于物联网的数字化农业小型气象站设计与实现
学术研究 | 基于物联网的数字化农业小型气象站设计与实现
-
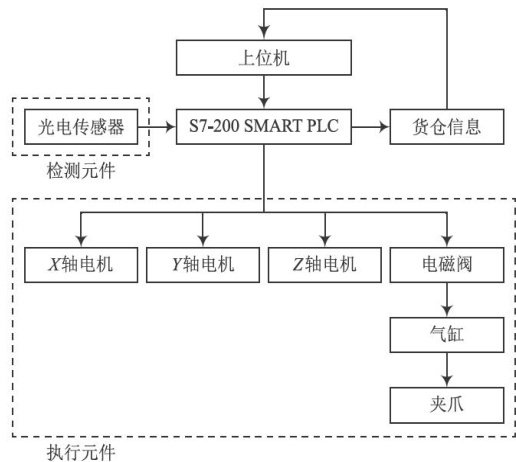
学术研究 | 基于PLC的立体仓储控制系统设计
学术研究 | 基于PLC的立体仓储控制系统设计
-
学术研究 | 医工交叉模式下物联网睡眠监测实验教学实践
学术研究 | 医工交叉模式下物联网睡眠监测实验教学实践
-
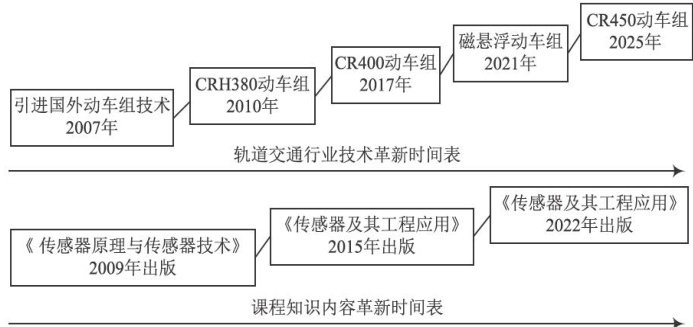
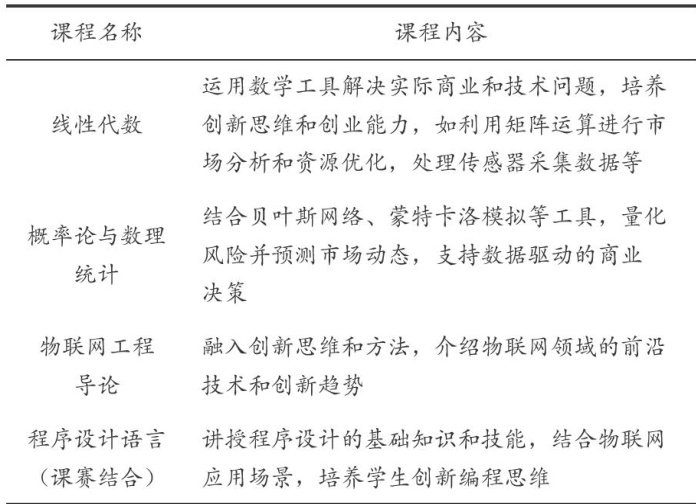
学术研究 | “传感器及工程应用”课程科研反哺教学创新与实践
学术研究 | “传感器及工程应用”课程科研反哺教学创新与实践
-
学术研究 | 共生理论视域下物联网工程专业专创融合课程体系构建
学术研究 | 共生理论视域下物联网工程专业专创融合课程体系构建
-
学术研究 | 物联网工程专业“人工智能”课程教学改革研究
学术研究 | 物联网工程专业“人工智能”课程教学改革研究





















 登录
登录