
目录
快速导航-
| 攻坚克难守正拓新
| 攻坚克难守正拓新
-
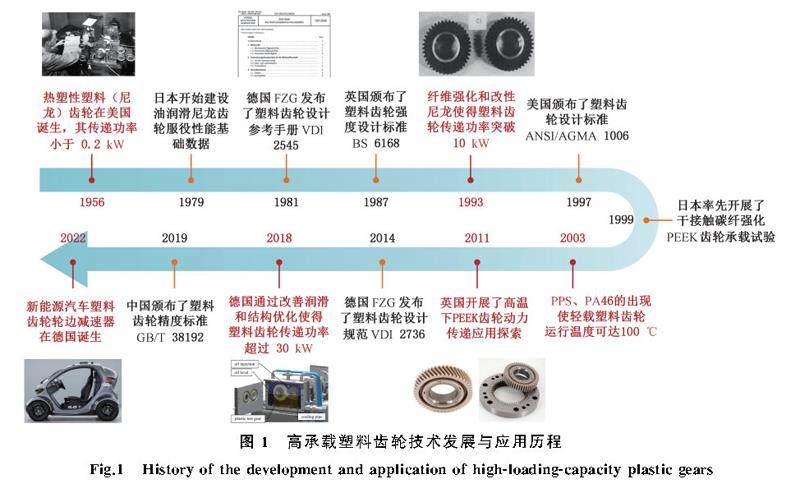
机械基础工程 | 塑料齿轮传动高承载技术发展与应用
机械基础工程 | 塑料齿轮传动高承载技术发展与应用
-
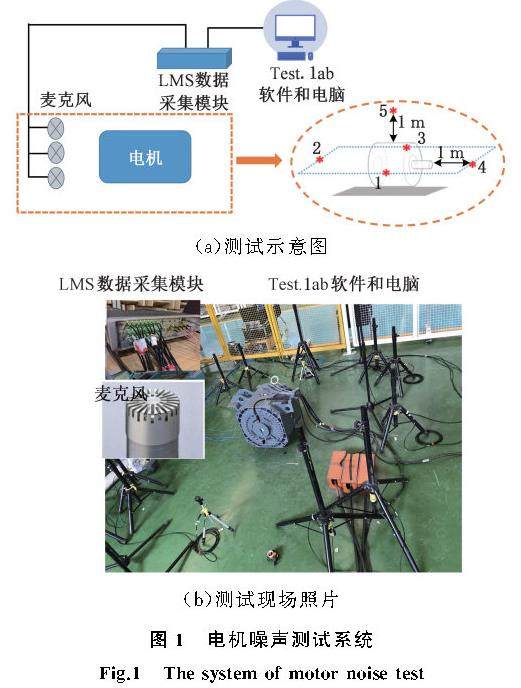
机械基础工程 | 自通风永磁同步电机的气动噪声优化
机械基础工程 | 自通风永磁同步电机的气动噪声优化
-
机械基础工程 | 短收尾螺栓的折叠缺陷工艺实验及疲劳特性
机械基础工程 | 短收尾螺栓的折叠缺陷工艺实验及疲劳特性
-
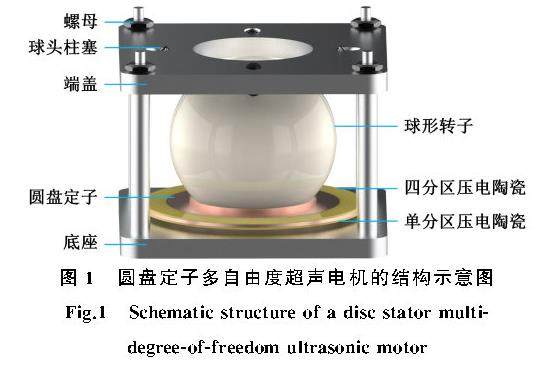
机械基础工程 | 贴片式圆盘定子多自由度超声电机的设计与实验
机械基础工程 | 贴片式圆盘定子多自由度超声电机的设计与实验
-
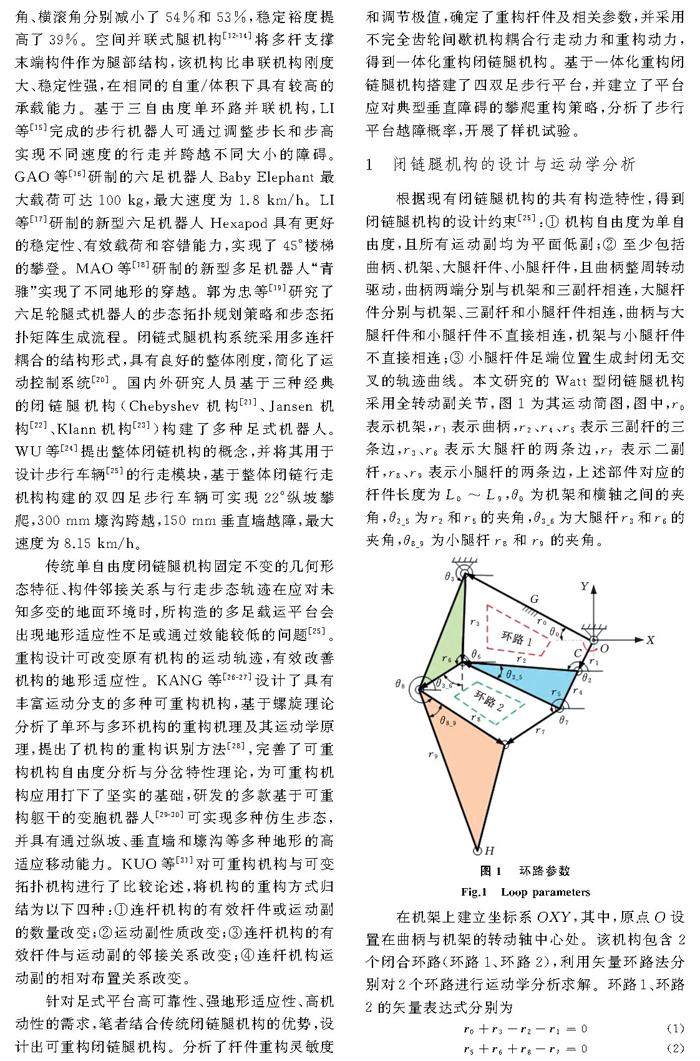
机械基础工程 | 一体化重构闭链腿机构的设计与越障性能分析
机械基础工程 | 一体化重构闭链腿机构的设计与越障性能分析
-
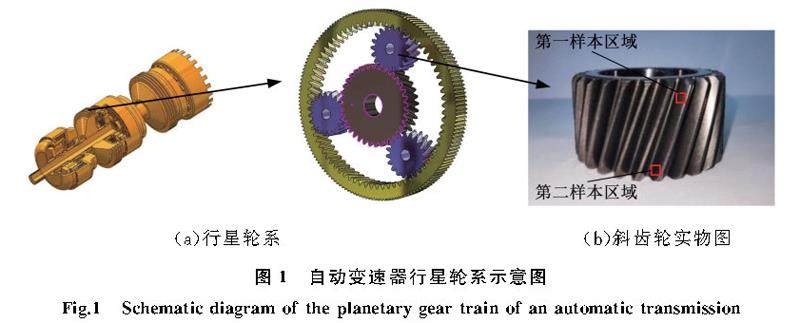
机械基础工程 | 斜齿轮表面形貌分形特征对时变接触刚度的影响
机械基础工程 | 斜齿轮表面形貌分形特征对时变接触刚度的影响
-
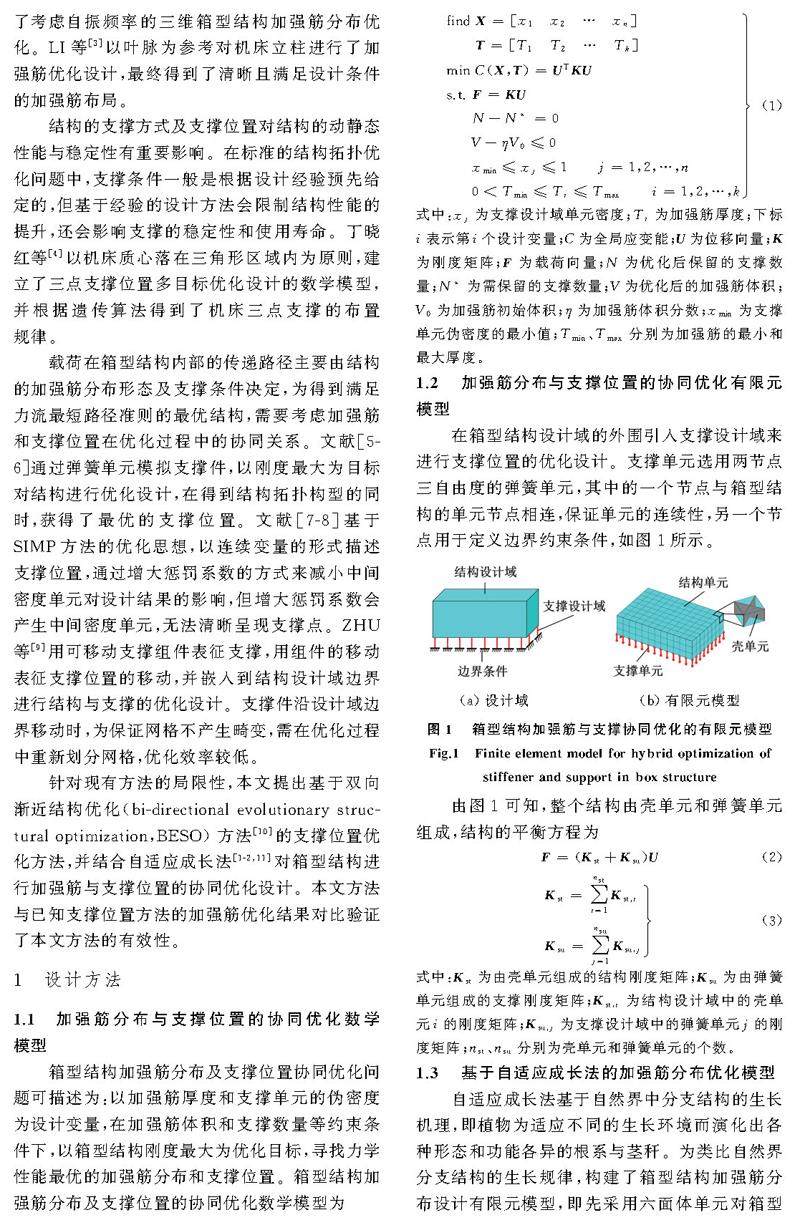
机械基础工程 | 箱型结构加强筋分布及支撑位置的协同优化设计
机械基础工程 | 箱型结构加强筋分布及支撑位置的协同优化设计
-
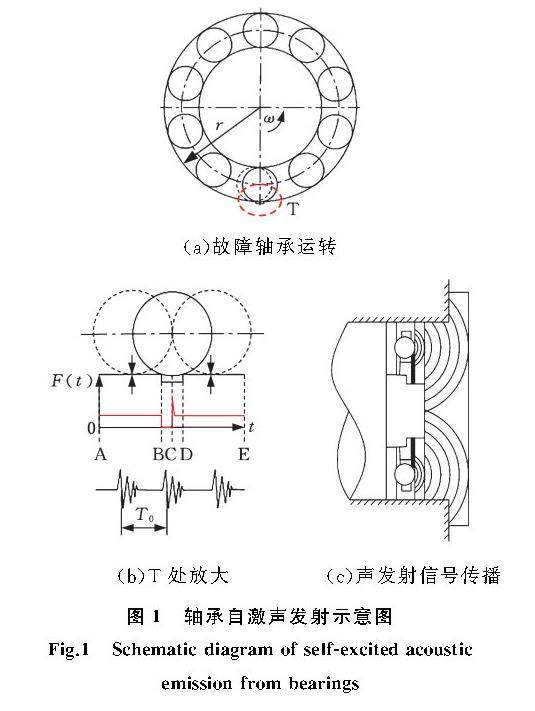
机械基础工程 | 轴承故障声发射信号的涡旋聚焦传输方法
机械基础工程 | 轴承故障声发射信号的涡旋聚焦传输方法
-
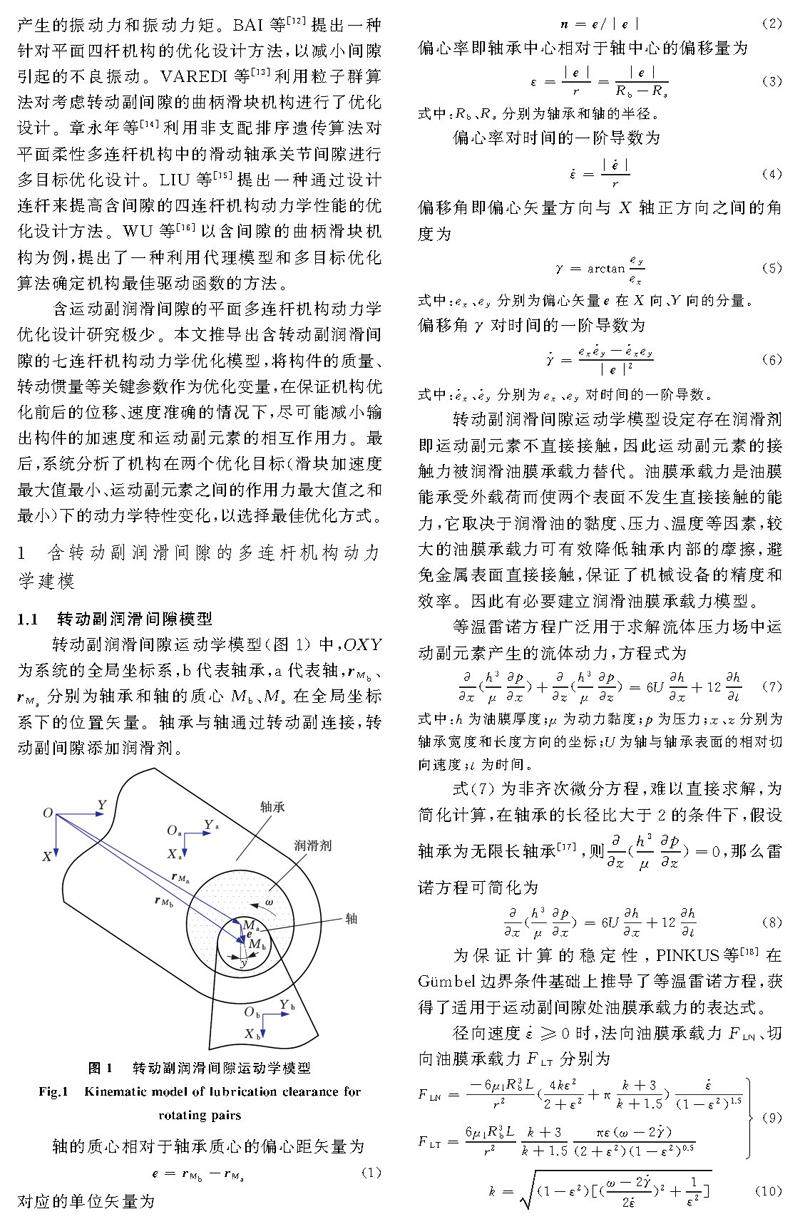
机械基础工程 | 含转动副润滑间隙的多连杆机构动力学优化设计
机械基础工程 | 含转动副润滑间隙的多连杆机构动力学优化设计
-
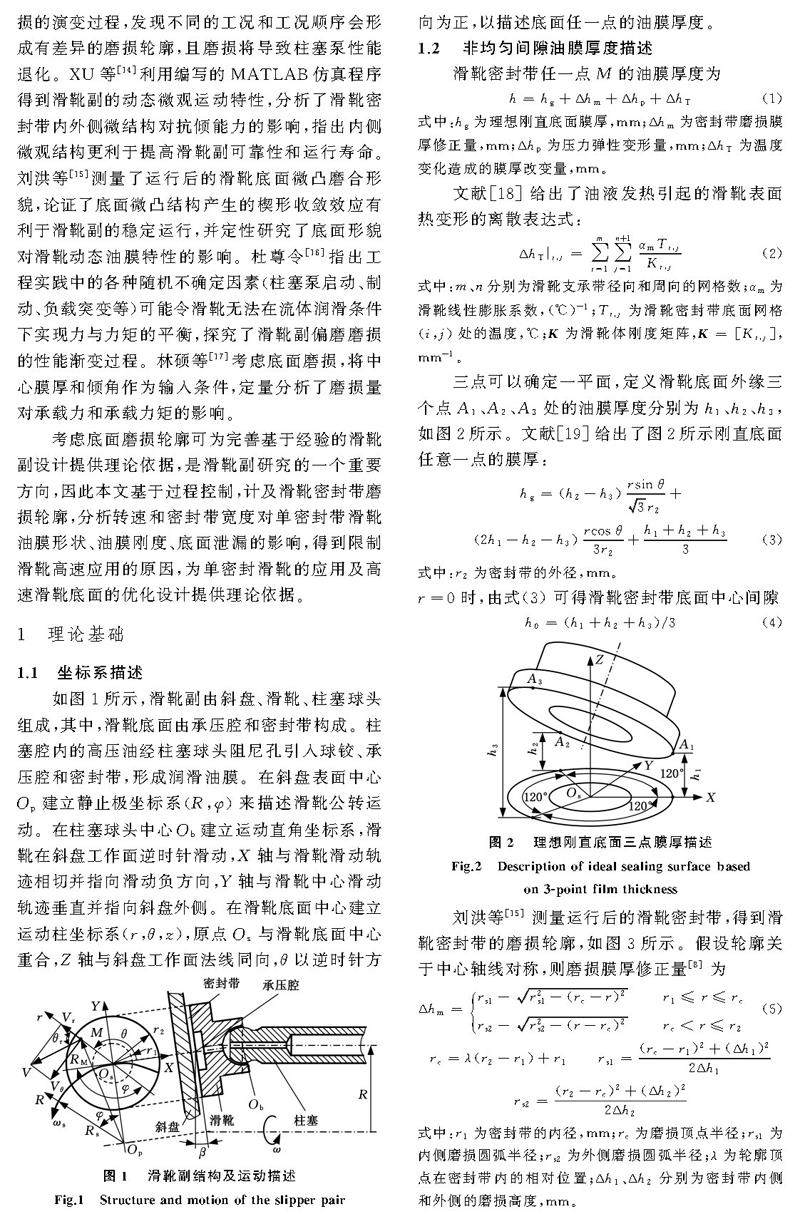
机械基础工程 | 单密封带滑靴高速应用的制约因素分析
机械基础工程 | 单密封带滑靴高速应用的制约因素分析
-
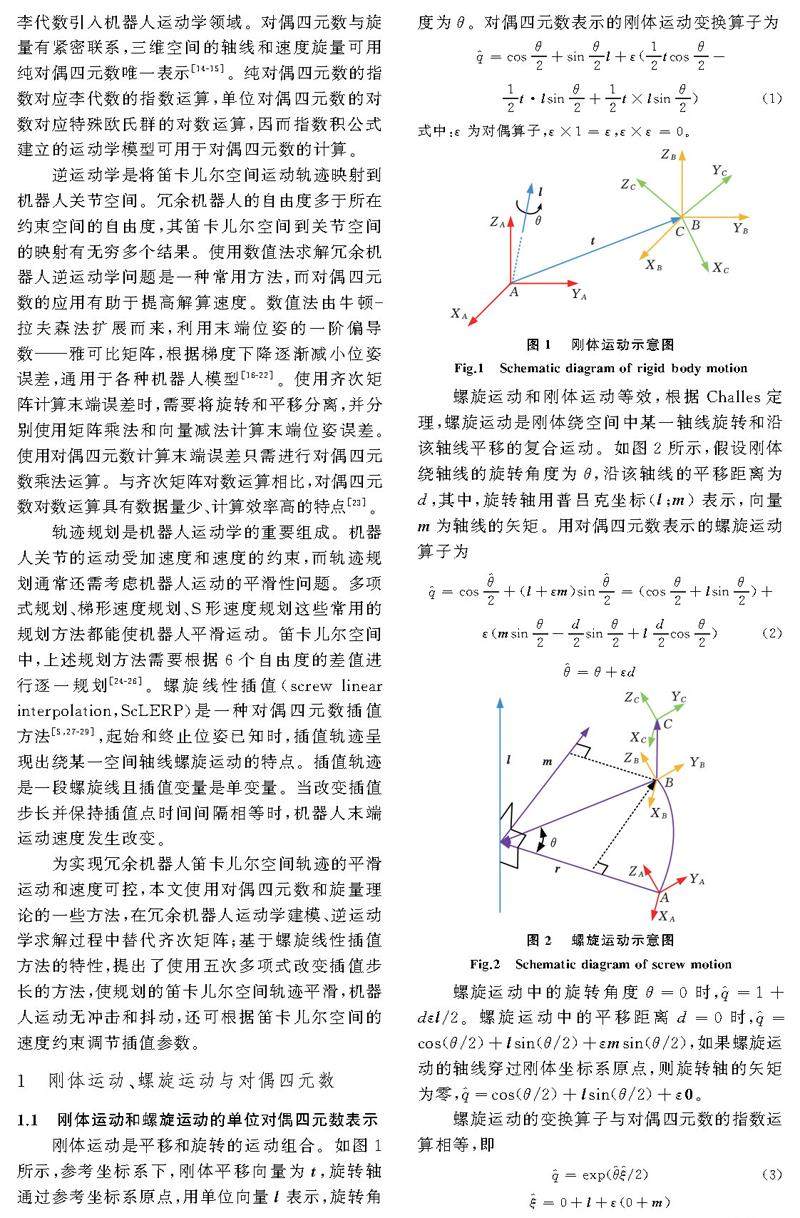
机械基础工程 | 冗余机器人的笛卡儿空间螺旋线性插值轨迹规划
机械基础工程 | 冗余机器人的笛卡儿空间螺旋线性插值轨迹规划
-
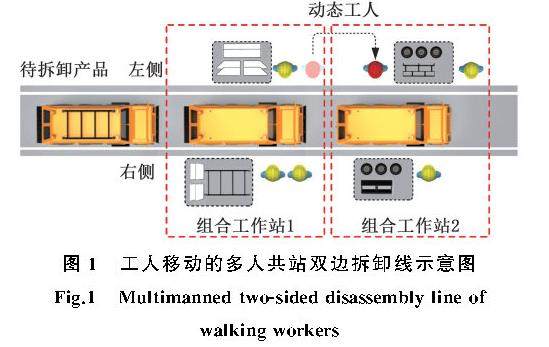
智能制造 | 考虑工人移动的多人共站双边拆卸线平衡问题的建模与优化
智能制造 | 考虑工人移动的多人共站双边拆卸线平衡问题的建模与优化
-
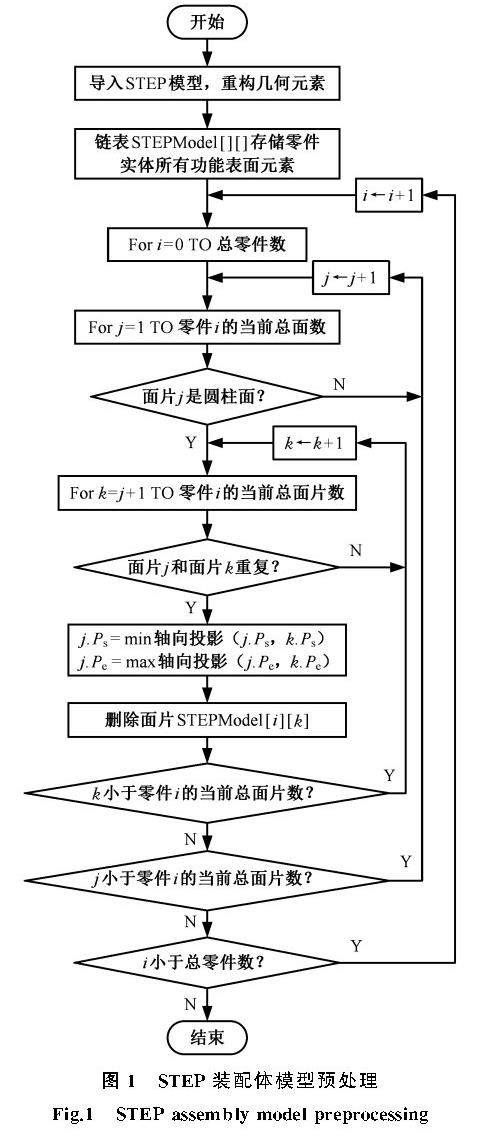
智能制造 | 面向STEP模型装配特征自动提取的装配信息模型构建
智能制造 | 面向STEP模型装配特征自动提取的装配信息模型构建
-
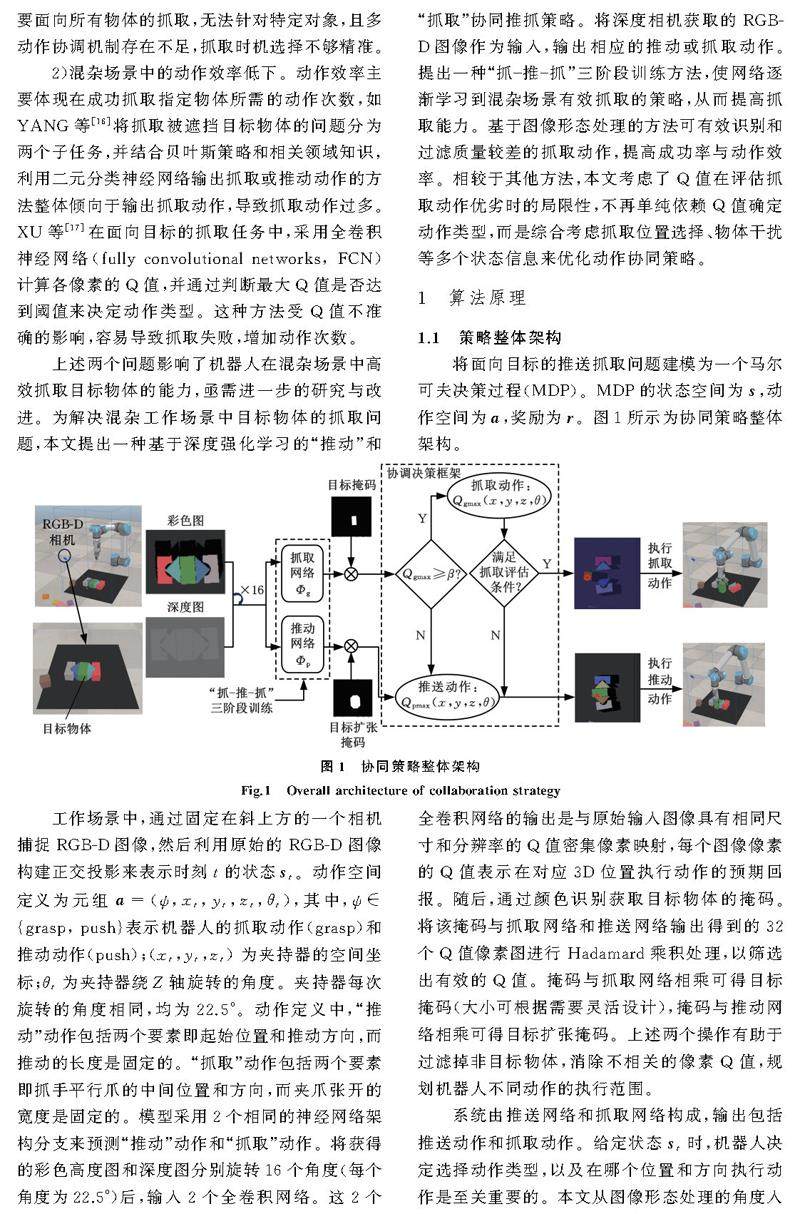
智能制造 | 基于深度强化学习的混杂场景目标物体推抓协同策略
智能制造 | 基于深度强化学习的混杂场景目标物体推抓协同策略
-

先进材料加工工程 | 加载角度对6082铝合金自冲铆接接头疲劳性能及失效模式的影响
先进材料加工工程 | 加载角度对6082铝合金自冲铆接接头疲劳性能及失效模式的影响
-

先进材料加工工程 | 采用电阻加热工艺的复合材料二次胶接接头的拉伸剪切性能
先进材料加工工程 | 采用电阻加热工艺的复合材料二次胶接接头的拉伸剪切性能
-
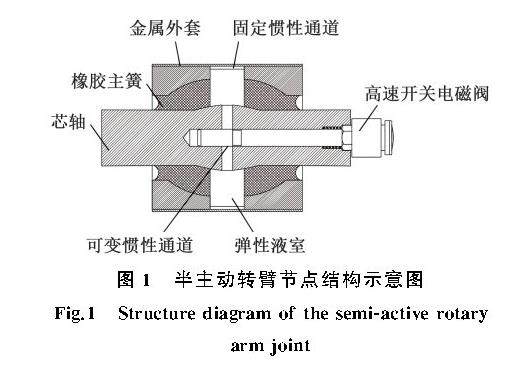
工程前沿 | 电力动车组变刚度转臂节点的半主动控制
工程前沿 | 电力动车组变刚度转臂节点的半主动控制
-
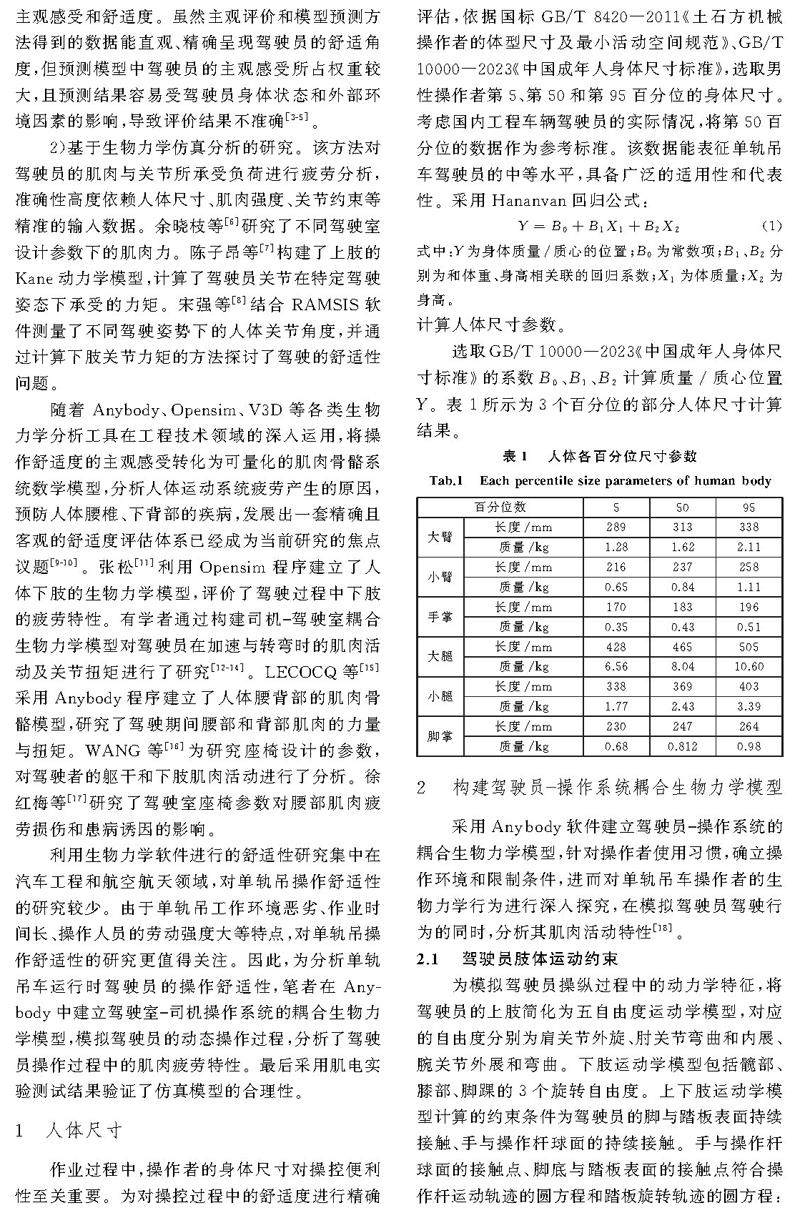
工程前沿 | 基于人机耦合模型和肌电实验的单轨吊车司机生物力学分析
工程前沿 | 基于人机耦合模型和肌电实验的单轨吊车司机生物力学分析
-
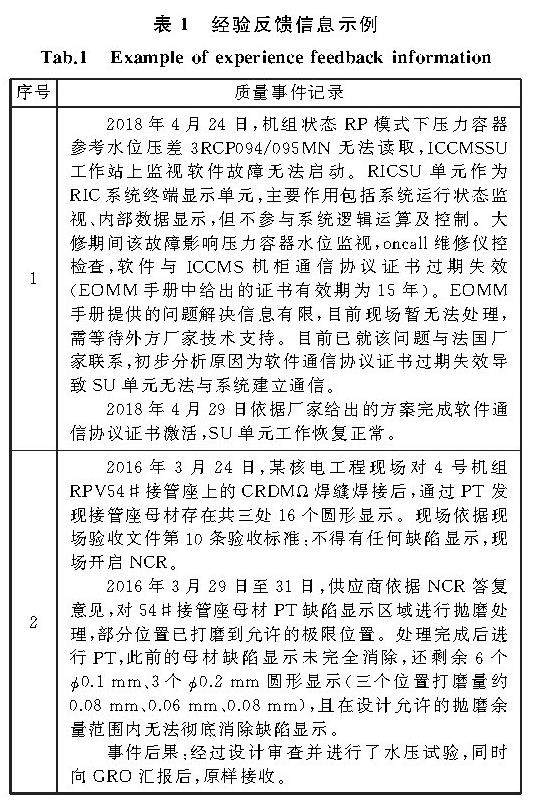
工程前沿 | 基于多维级联知识抽取的核电建造经验反馈图谱研究
工程前沿 | 基于多维级联知识抽取的核电建造经验反馈图谱研究











 登录
登录