
目录
快速导航-

电子与信息器件 | 基于CNN⁃Transformer模型的自动扶梯轴承故障诊断方法研究
电子与信息器件 | 基于CNN⁃Transformer模型的自动扶梯轴承故障诊断方法研究
-
电子与信息器件 | 基于加速退化试验的脉宽调制器贮存寿命预测研究
电子与信息器件 | 基于加速退化试验的脉宽调制器贮存寿命预测研究
-
电子与信息器件 | 基于多路光流信息的微光视频增强算法
电子与信息器件 | 基于多路光流信息的微光视频增强算法
-
电子与信息器件 | AlGaN/GaN异质结HEMT电学特性仿真研究
电子与信息器件 | AlGaN/GaN异质结HEMT电学特性仿真研究
-
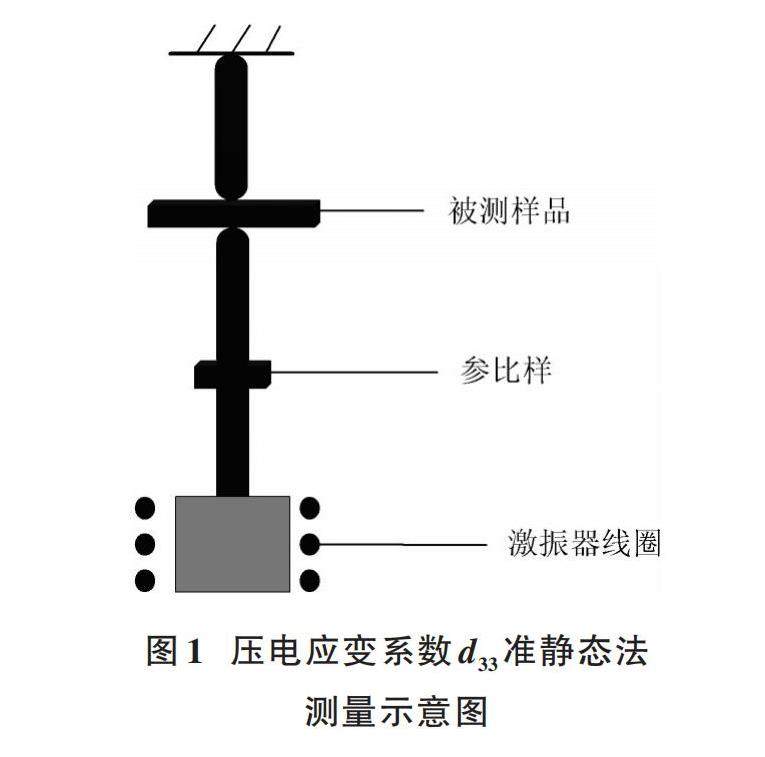
电子与信息器件 | 原位式准静态压电材料温度特性测试系统研发
电子与信息器件 | 原位式准静态压电材料温度特性测试系统研发
-
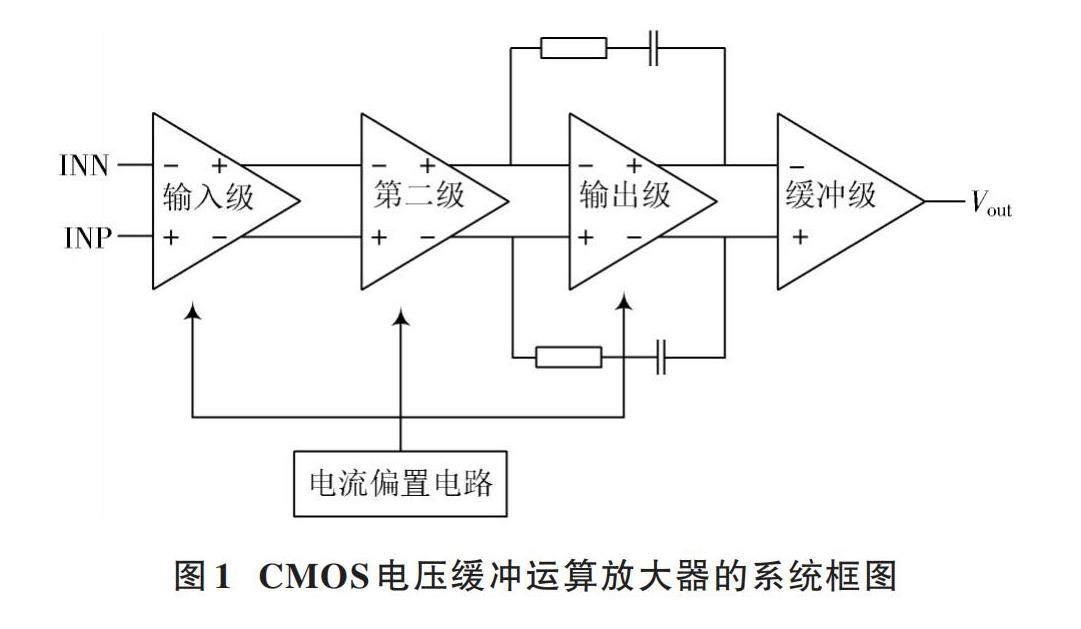
电子与信息器件 | 高增益高驱动能力的基准电压缓冲芯片的设计
电子与信息器件 | 高增益高驱动能力的基准电压缓冲芯片的设计
-

电子与信息器件 | 基于FMCW雷达和ESP⁃EMSH网络的非接触健康监测系统
电子与信息器件 | 基于FMCW雷达和ESP⁃EMSH网络的非接触健康监测系统
-

计算机科学与应用 | 基于时间戳间距的用户在线时长聚类方法
计算机科学与应用 | 基于时间戳间距的用户在线时长聚类方法
-
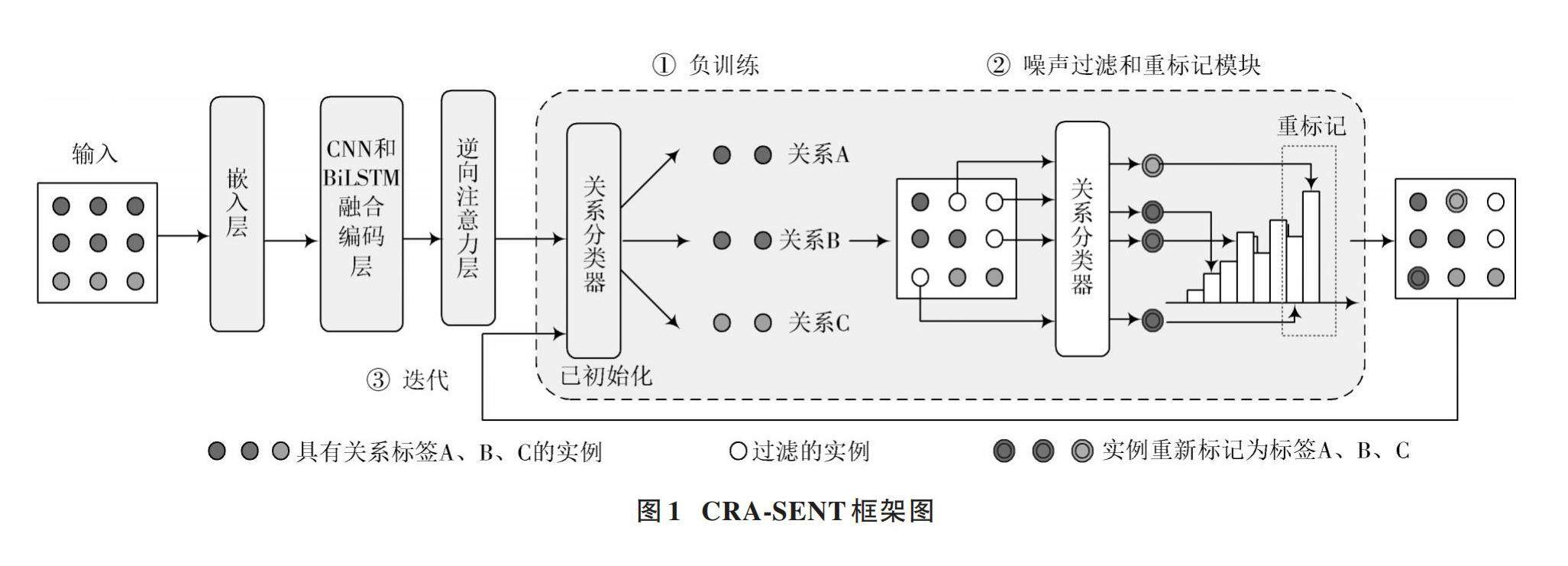
计算机科学与应用 | 基于SENT改进的远程监督关系抽取方法
计算机科学与应用 | 基于SENT改进的远程监督关系抽取方法
-
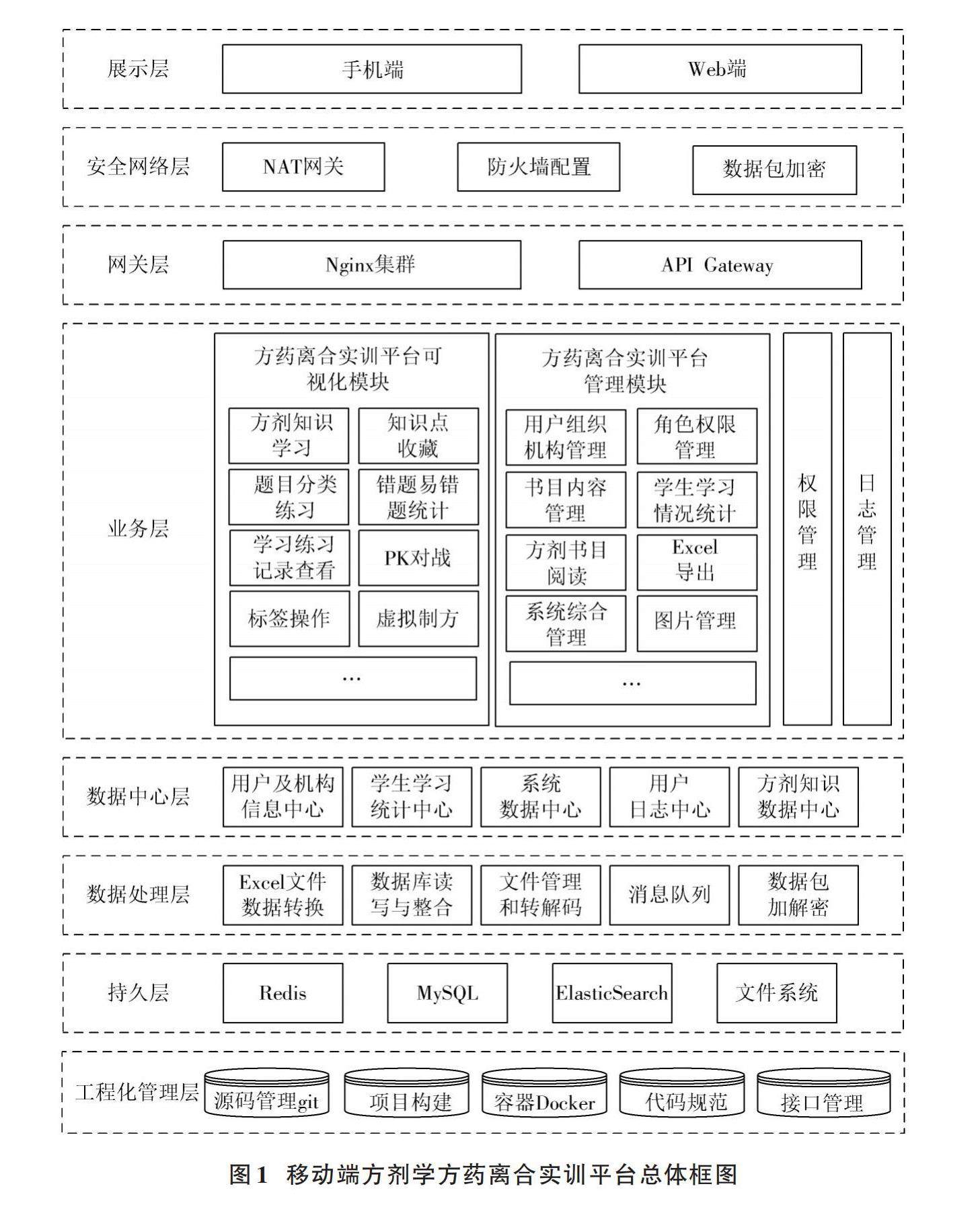
计算机科学与应用 | 基于移动端的方药离合实训平台设计与实现
计算机科学与应用 | 基于移动端的方药离合实训平台设计与实现
-
能源技术 | 基于多策略改进的SMC⁃GTO电机速度跟踪控制
能源技术 | 基于多策略改进的SMC⁃GTO电机速度跟踪控制
-

能源技术 | 新型三定子直流无刷电机的设计与特性分析
能源技术 | 新型三定子直流无刷电机的设计与特性分析
-
激光与红外技术 | 改进关联策略的三维多目标跟踪算法
激光与红外技术 | 改进关联策略的三维多目标跟踪算法
-
激光与红外技术 | 多传感器融合的无人车自主定位实验研究
激光与红外技术 | 多传感器融合的无人车自主定位实验研究
-

航空航天航海技术 | 基于FastestDet的多目标靶定位方法
航空航天航海技术 | 基于FastestDet的多目标靶定位方法
-

航空航天航海技术 | 基于改进金豺算法的无人机三维航迹规划
航空航天航海技术 | 基于改进金豺算法的无人机三维航迹规划
-
人工智能 | 面向服务的智能建筑软件框架研究
人工智能 | 面向服务的智能建筑软件框架研究
-
人工智能 | 面向工艺数据分析的流程工业入侵检测及攻击定位
人工智能 | 面向工艺数据分析的流程工业入侵检测及攻击定位
-
人工智能 | 面向智能驾驶的轻量化GwcNet立体匹配算法研究
人工智能 | 面向智能驾驶的轻量化GwcNet立体匹配算法研究
-
人工智能 | 面向自动紧急转向场景的自动驾驶测试用例生成方法
人工智能 | 面向自动紧急转向场景的自动驾驶测试用例生成方法
-

人工智能 | 基于内在好奇心与自模仿学习的探索算法
人工智能 | 基于内在好奇心与自模仿学习的探索算法
-
前沿交叉科学 | 基于注意力机制的跨境断面水质预测模型研究
前沿交叉科学 | 基于注意力机制的跨境断面水质预测模型研究
-
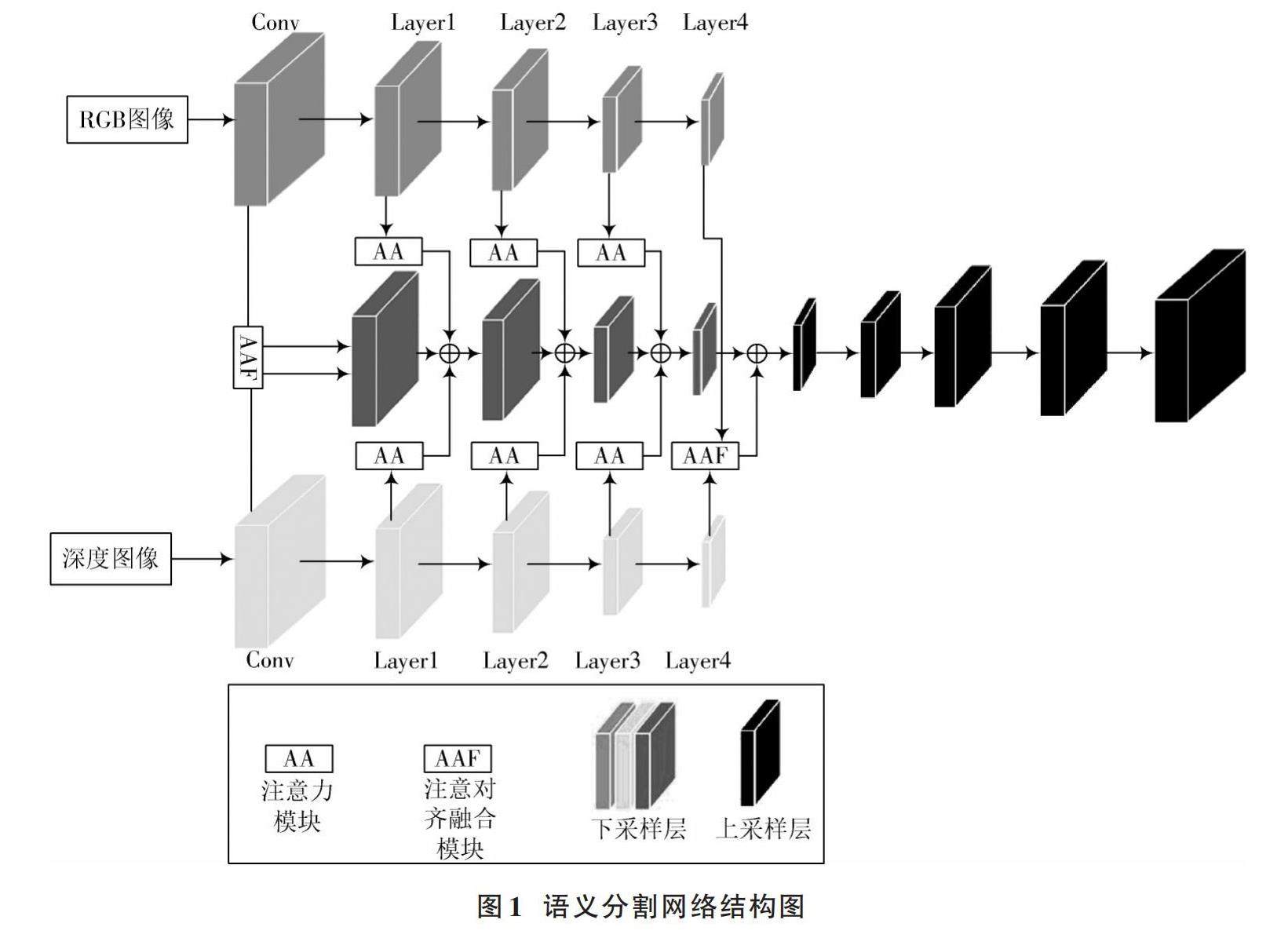
前沿交叉科学 | 基于多模态对齐融合的车厢部件语义分割算法
前沿交叉科学 | 基于多模态对齐融合的车厢部件语义分割算法
-

前沿交叉科学 | 基于CART决策树的分布式数据离群点检测算法
前沿交叉科学 | 基于CART决策树的分布式数据离群点检测算法
-

前沿交叉科学 | 一种基于YOLOv8的轻量化盲区检测网络
前沿交叉科学 | 一种基于YOLOv8的轻量化盲区检测网络
-

前沿交叉科学 | 基于主成分分析的DBSCAN分类差分进化算法改进
前沿交叉科学 | 基于主成分分析的DBSCAN分类差分进化算法改进
-
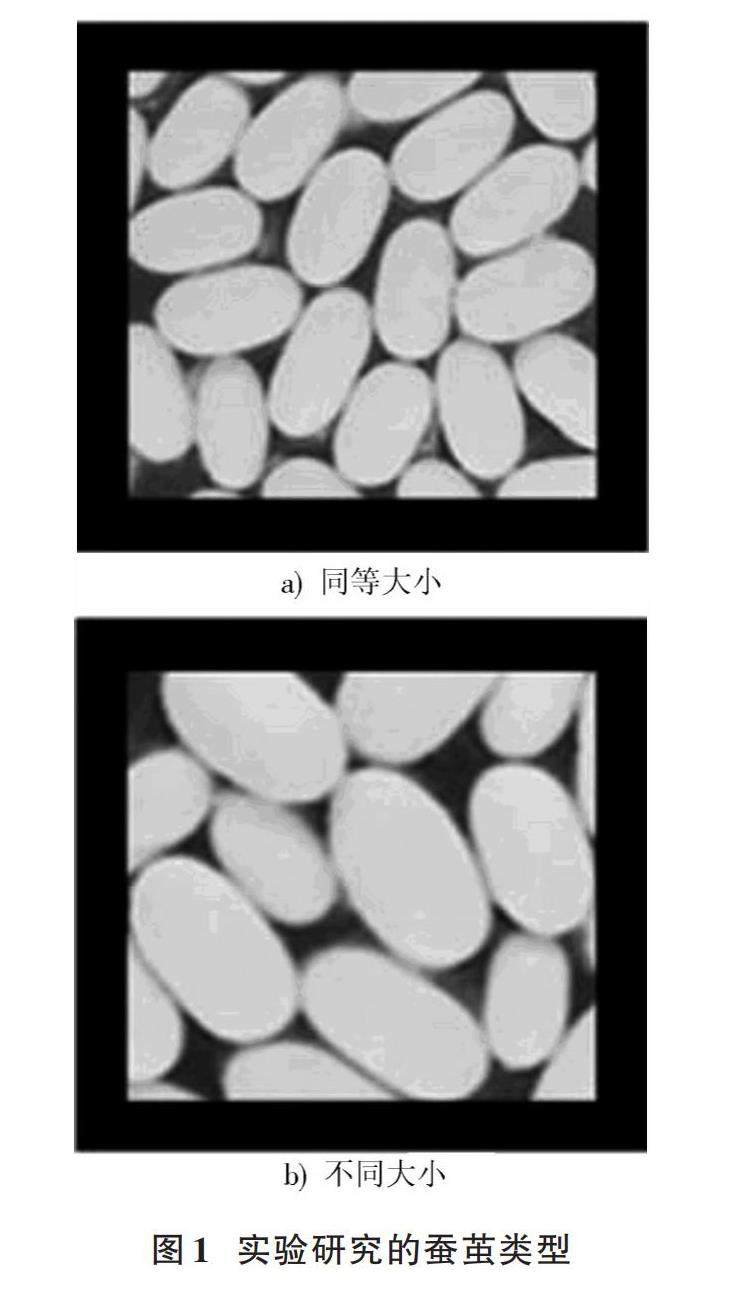
前沿交叉科学 | 基于间断性Gamma校正的粘连蚕茧分割方法研究
前沿交叉科学 | 基于间断性Gamma校正的粘连蚕茧分割方法研究
过往期刊
更多-

现代电子技术
2024年22期 -

现代电子技术
2024年21期 -

现代电子技术
2024年20期 -

现代电子技术
2024年19期 -

现代电子技术
2024年18期 -

现代电子技术
2024年17期 -

现代电子技术
2024年16期 -

现代电子技术
2024年15期 -

现代电子技术
2024年14期 -

现代电子技术
2024年13期 -

现代电子技术
2024年12期 -

现代电子技术
2024年11期 -

现代电子技术
2024年10期 -

现代电子技术
2024年09期 -

现代电子技术
2024年08期 -

现代电子技术
2024年07期 -

现代电子技术
2024年06期 -

现代电子技术
2024年05期 -

现代电子技术
2024年04期 -

现代电子技术
2024年03期 -

现代电子技术
2024年02期 -

现代电子技术
2024年01期







 登录
登录