
目录
快速导航-
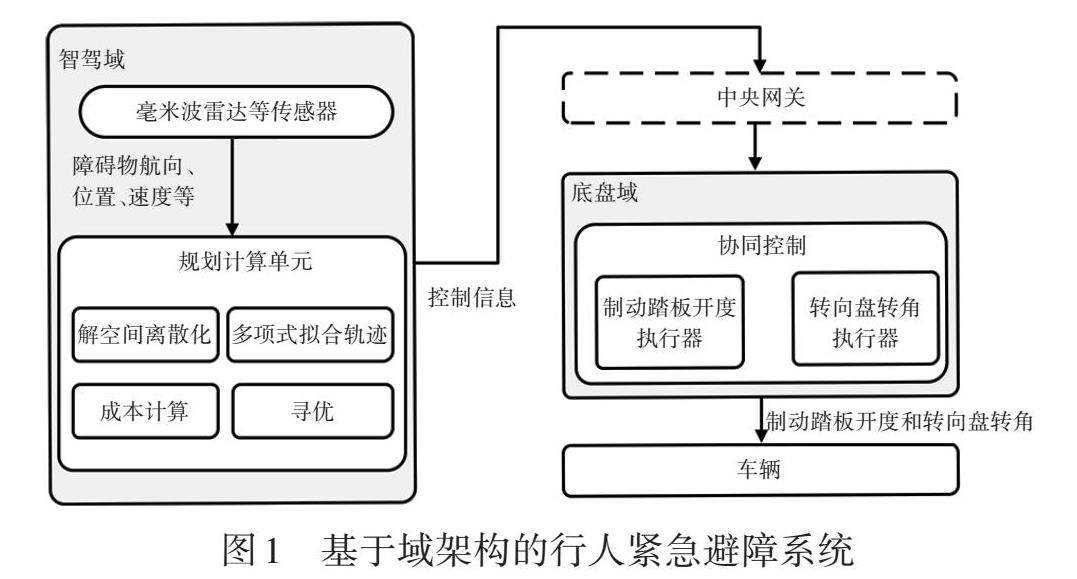
2024中国汽车工程学会年会优秀论文专题 | 基于域架构的纵横向结合行人紧急避障系统研究
2024中国汽车工程学会年会优秀论文专题 | 基于域架构的纵横向结合行人紧急避障系统研究
-

2024中国汽车工程学会年会优秀论文专题 | 基于自适应势场的车辆避撞轨迹规划与跟踪控制
2024中国汽车工程学会年会优秀论文专题 | 基于自适应势场的车辆避撞轨迹规划与跟踪控制
-
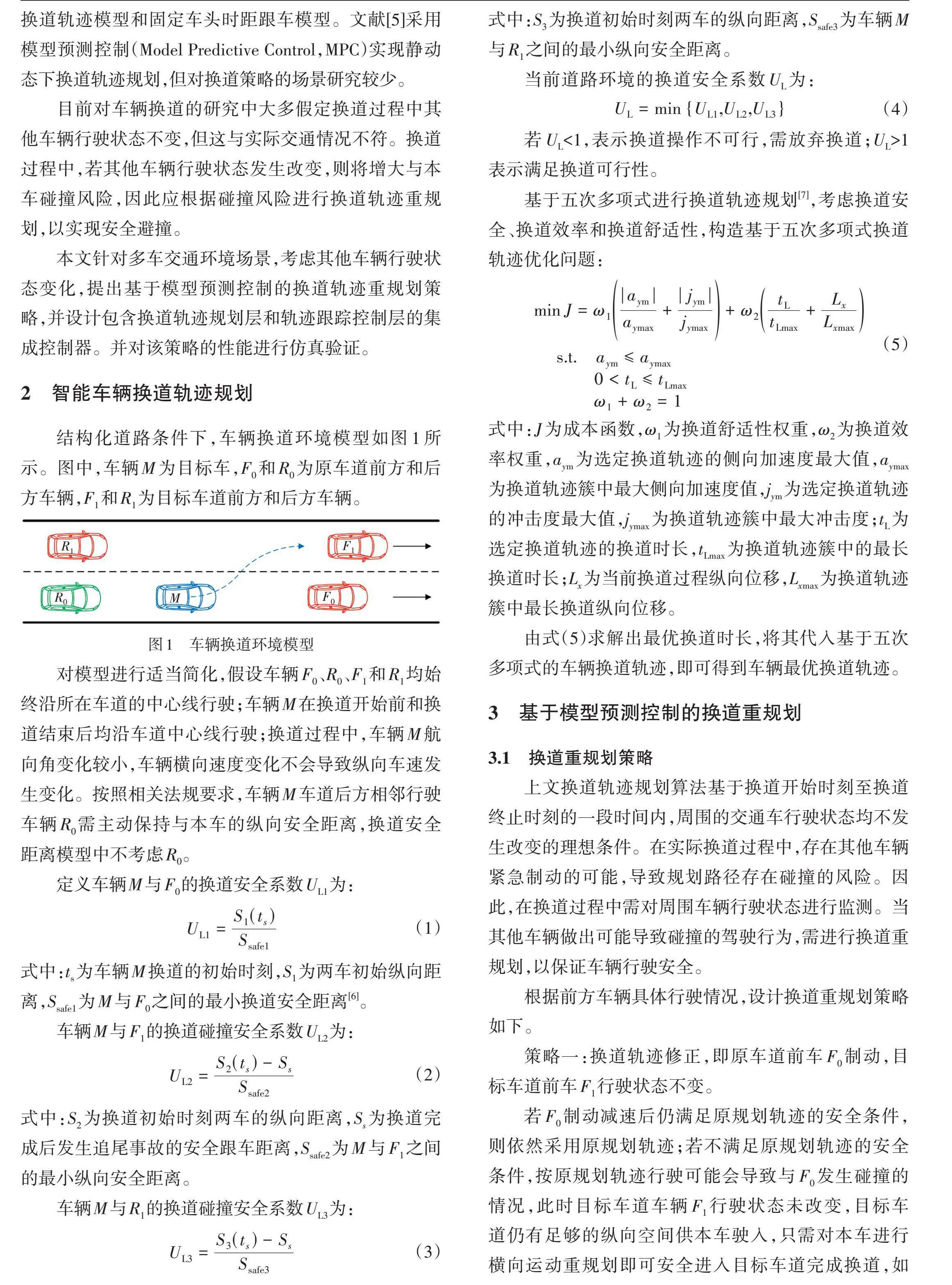
2024中国汽车工程学会年会优秀论文专题 | 基于MPC的智能车辆换道重规划研究
2024中国汽车工程学会年会优秀论文专题 | 基于MPC的智能车辆换道重规划研究
-
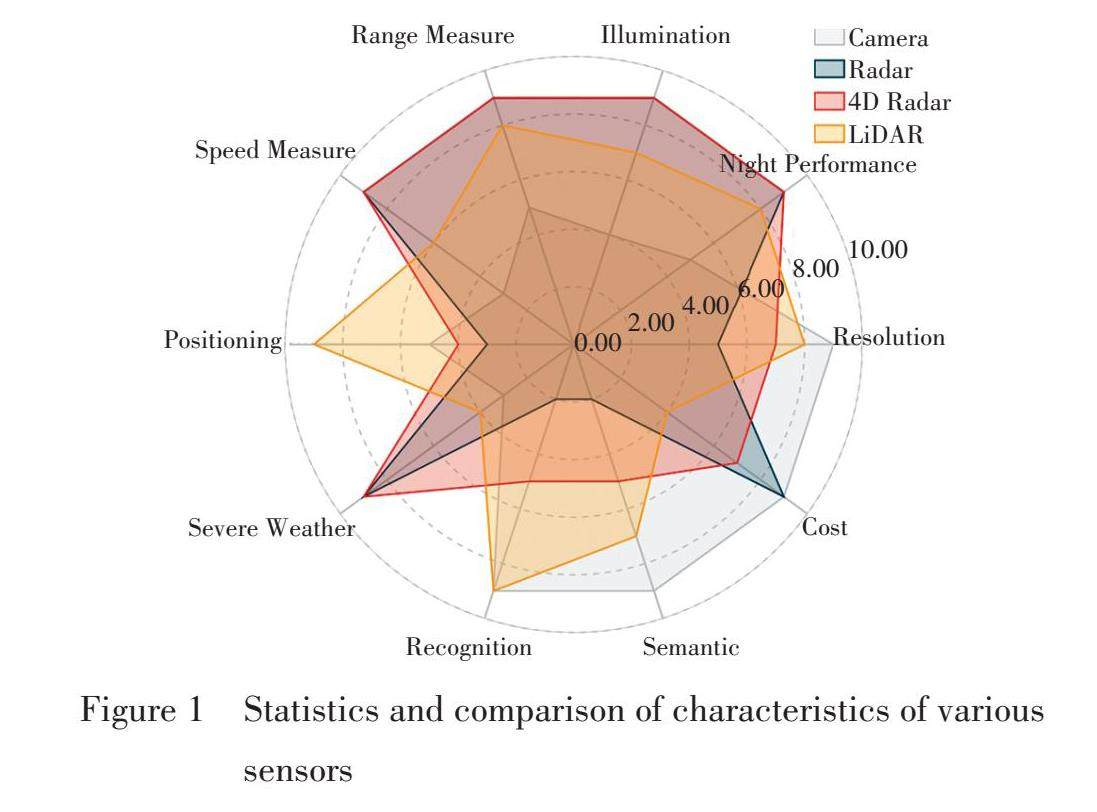
2024中国汽车工程学会年会优秀论文专题 | 基于整车最优原则的多传感器融合配置机理研究(英文)*
2024中国汽车工程学会年会优秀论文专题 | 基于整车最优原则的多传感器融合配置机理研究(英文)*
-
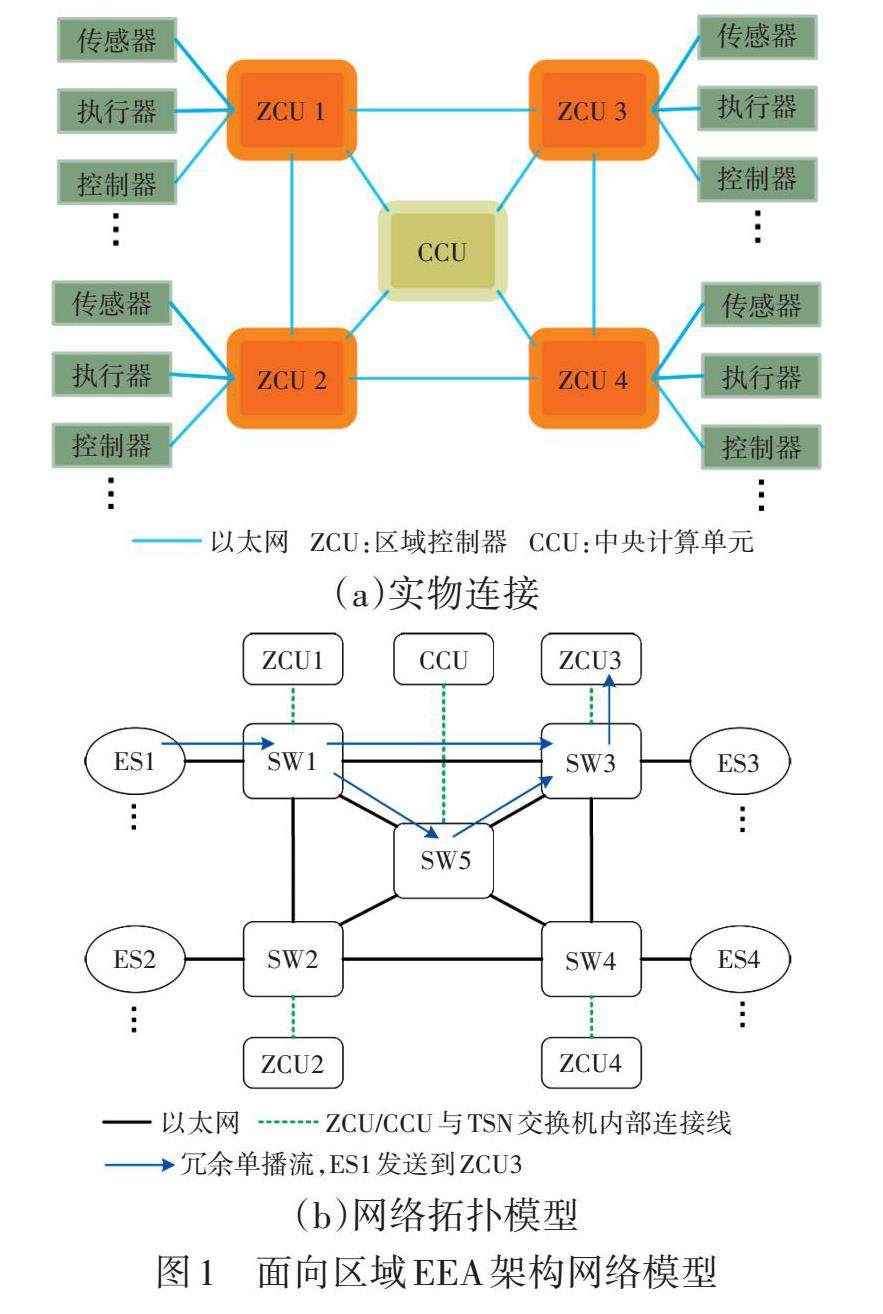
车联网通信性能优化与安全技术专题 | 时间敏感网络中时间触发流冗余路由与调度研究
车联网通信性能优化与安全技术专题 | 时间敏感网络中时间触发流冗余路由与调度研究
-
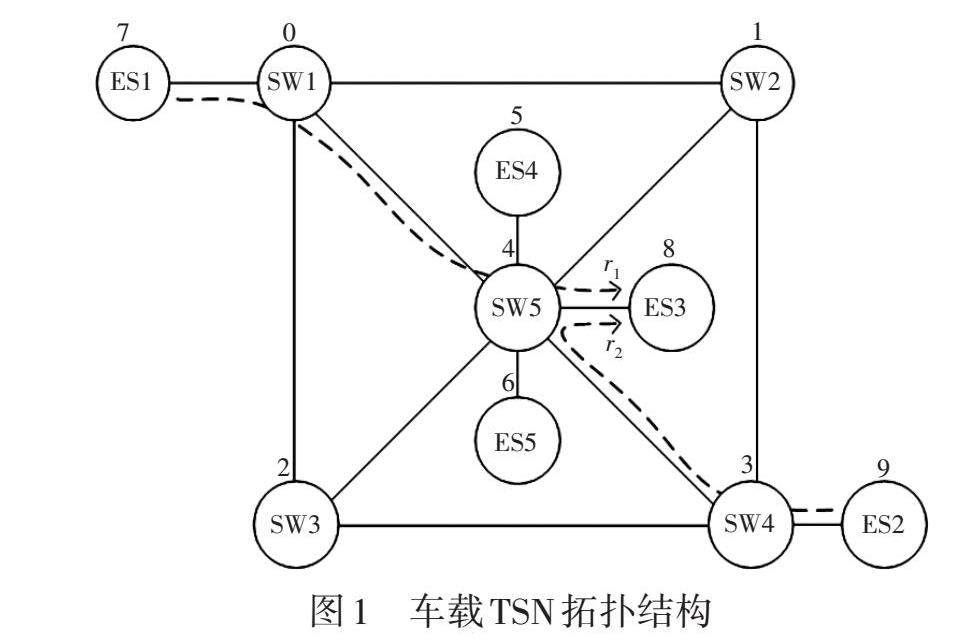
车联网通信性能优化与安全技术专题 | TSN中具有实时感知的AVB路由与调度算法
车联网通信性能优化与安全技术专题 | TSN中具有实时感知的AVB路由与调度算法
-
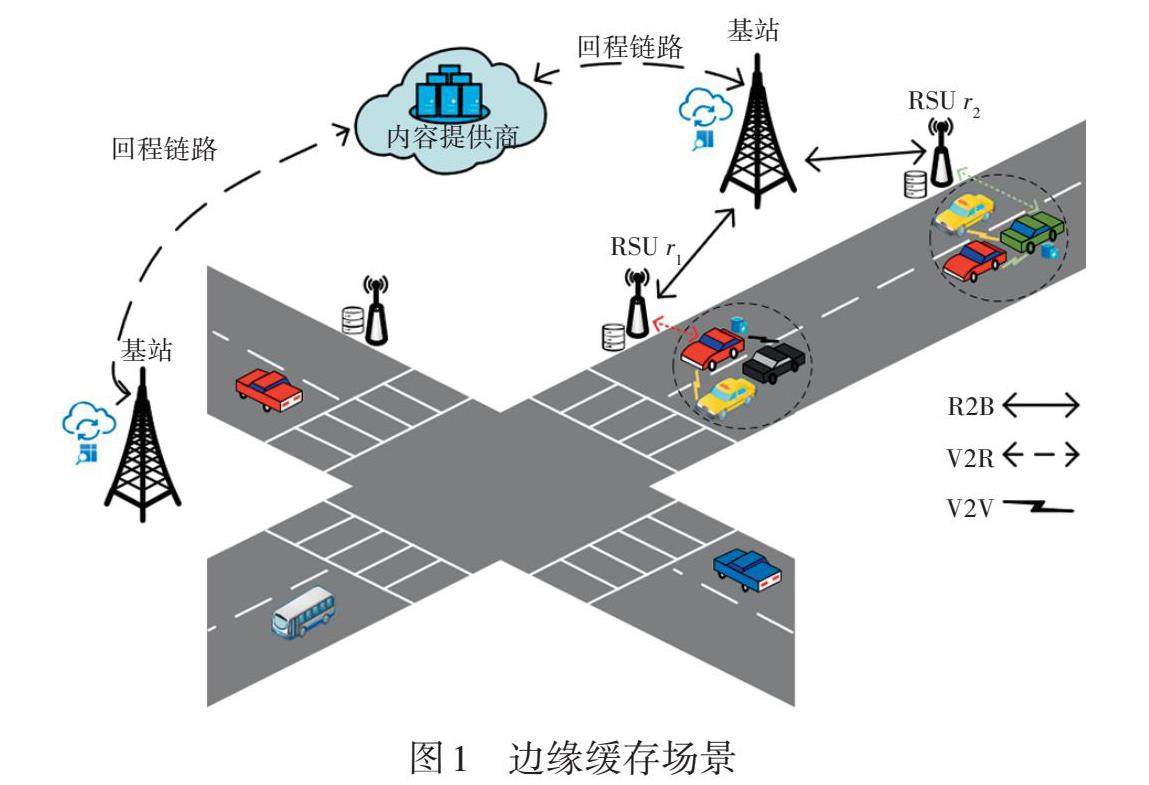
车联网通信性能优化与安全技术专题 | 车联网中基于联邦和强化学习的边缘缓存策略
车联网通信性能优化与安全技术专题 | 车联网中基于联邦和强化学习的边缘缓存策略
-
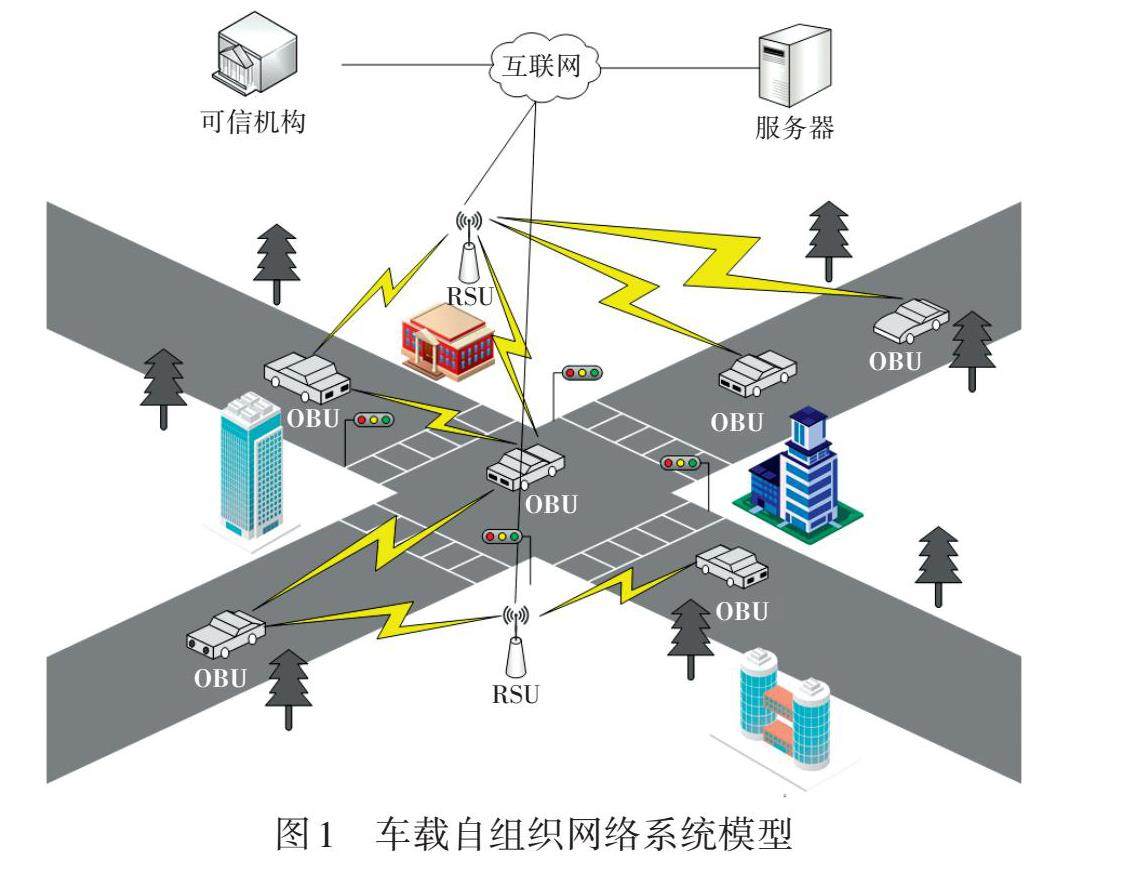
车联网通信性能优化与安全技术专题 | 一种适用于车载自组织网络的无证书混合签密方案
车联网通信性能优化与安全技术专题 | 一种适用于车载自组织网络的无证书混合签密方案
















 登录
登录