
目录
快速导航-
智能车辆运动规划与控制技术专题 | 基于门控循环单元和Transformer的车辆轨迹预测方法※
智能车辆运动规划与控制技术专题 | 基于门控循环单元和Transformer的车辆轨迹预测方法※
-
智能车辆运动规划与控制技术专题 | 基于Transformer改进的YOLOv5+DeepSORT的车辆跟踪算法※
智能车辆运动规划与控制技术专题 | 基于Transformer改进的YOLOv5+DeepSORT的车辆跟踪算法※
-
智能车辆运动规划与控制技术专题 | 考虑驾驶风格的高速行驶工况自动换道决策规划研究
智能车辆运动规划与控制技术专题 | 考虑驾驶风格的高速行驶工况自动换道决策规划研究
-
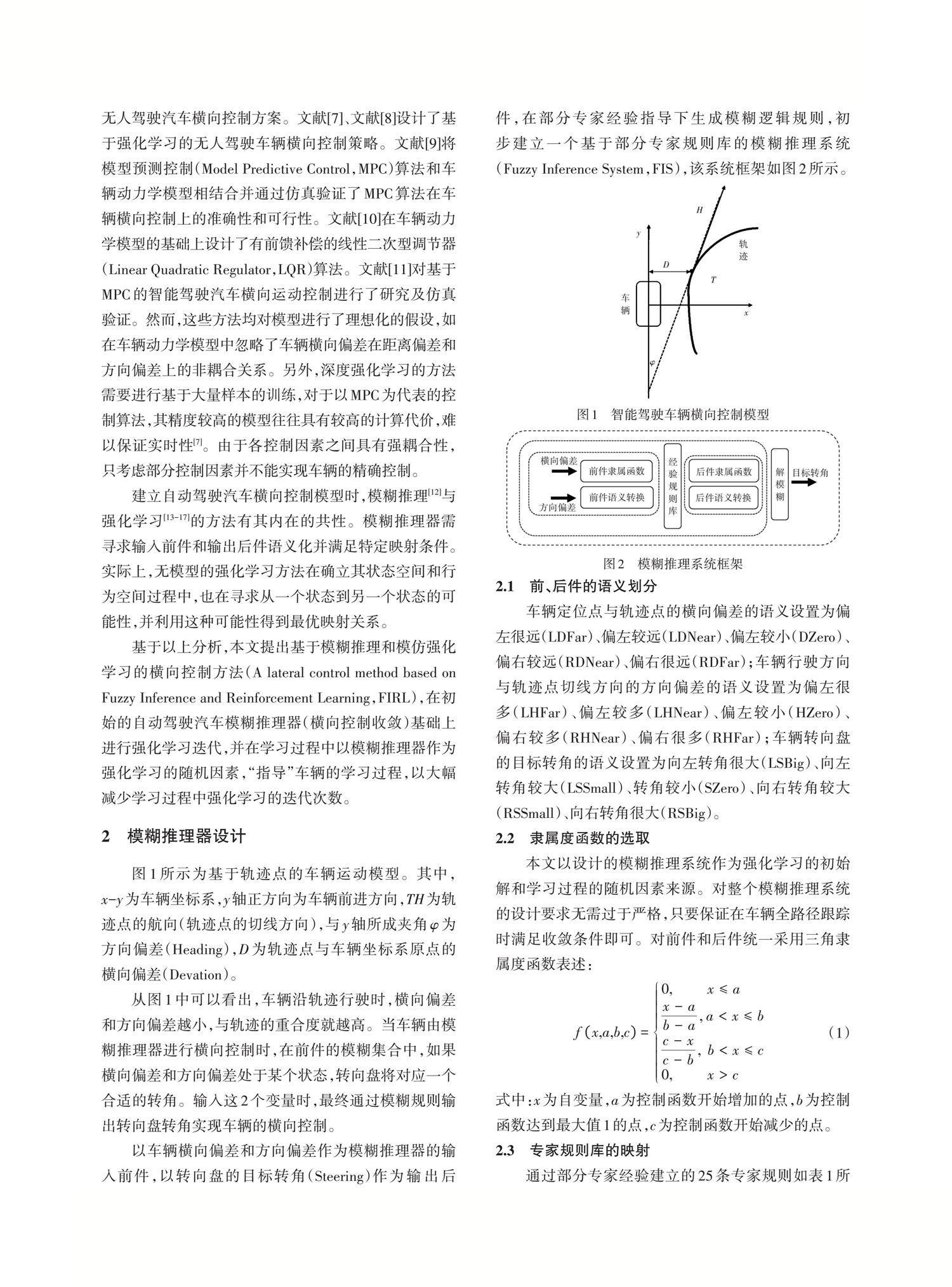
智能车辆运动规划与控制技术专题 | 基于模糊收敛和模仿强化学习的自动驾驶横向控制方法
智能车辆运动规划与控制技术专题 | 基于模糊收敛和模仿强化学习的自动驾驶横向控制方法
-
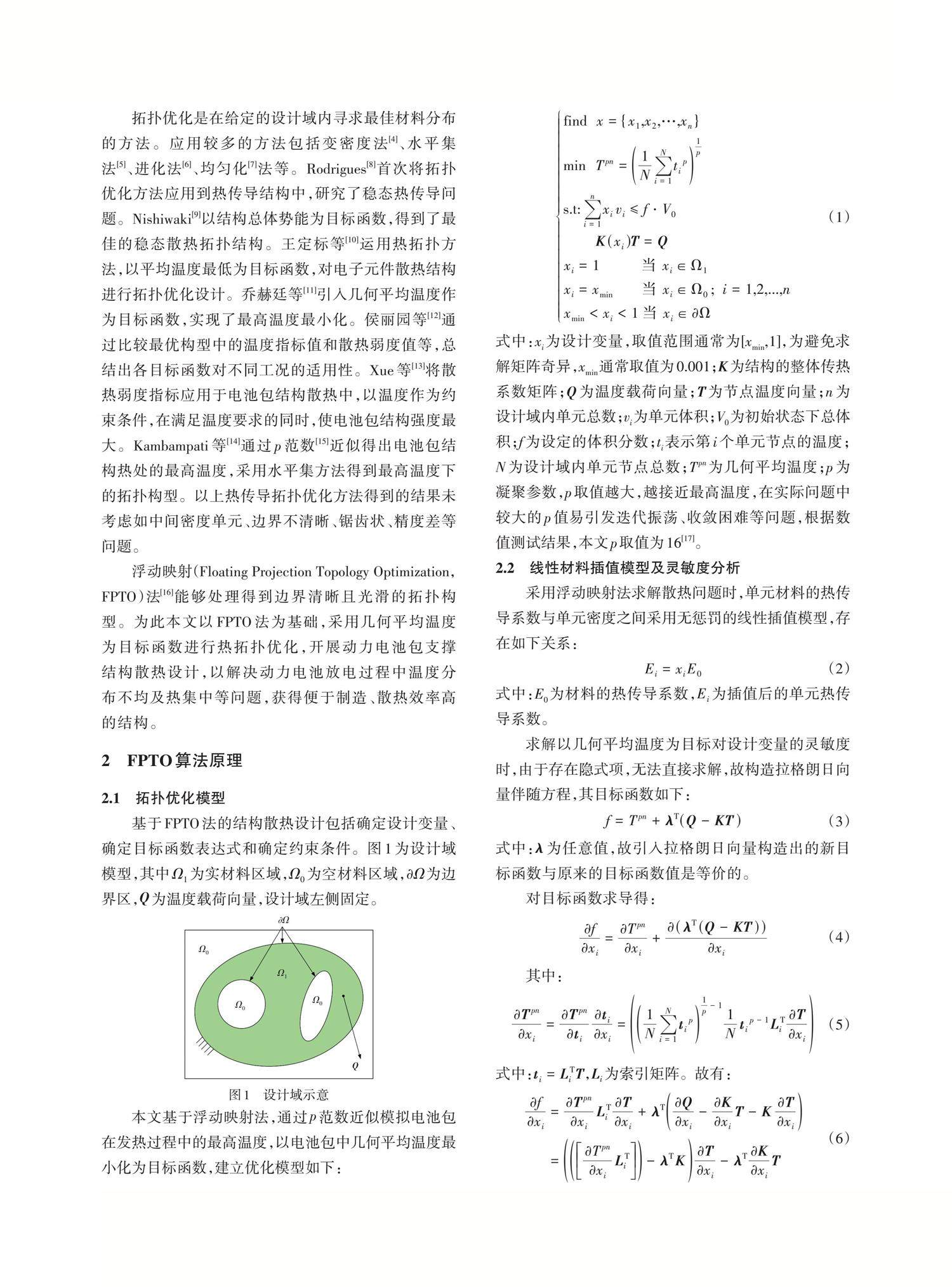
| 基于浮动映射法的动力电池包散热结构设计
| 基于浮动映射法的动力电池包散热结构设计
-
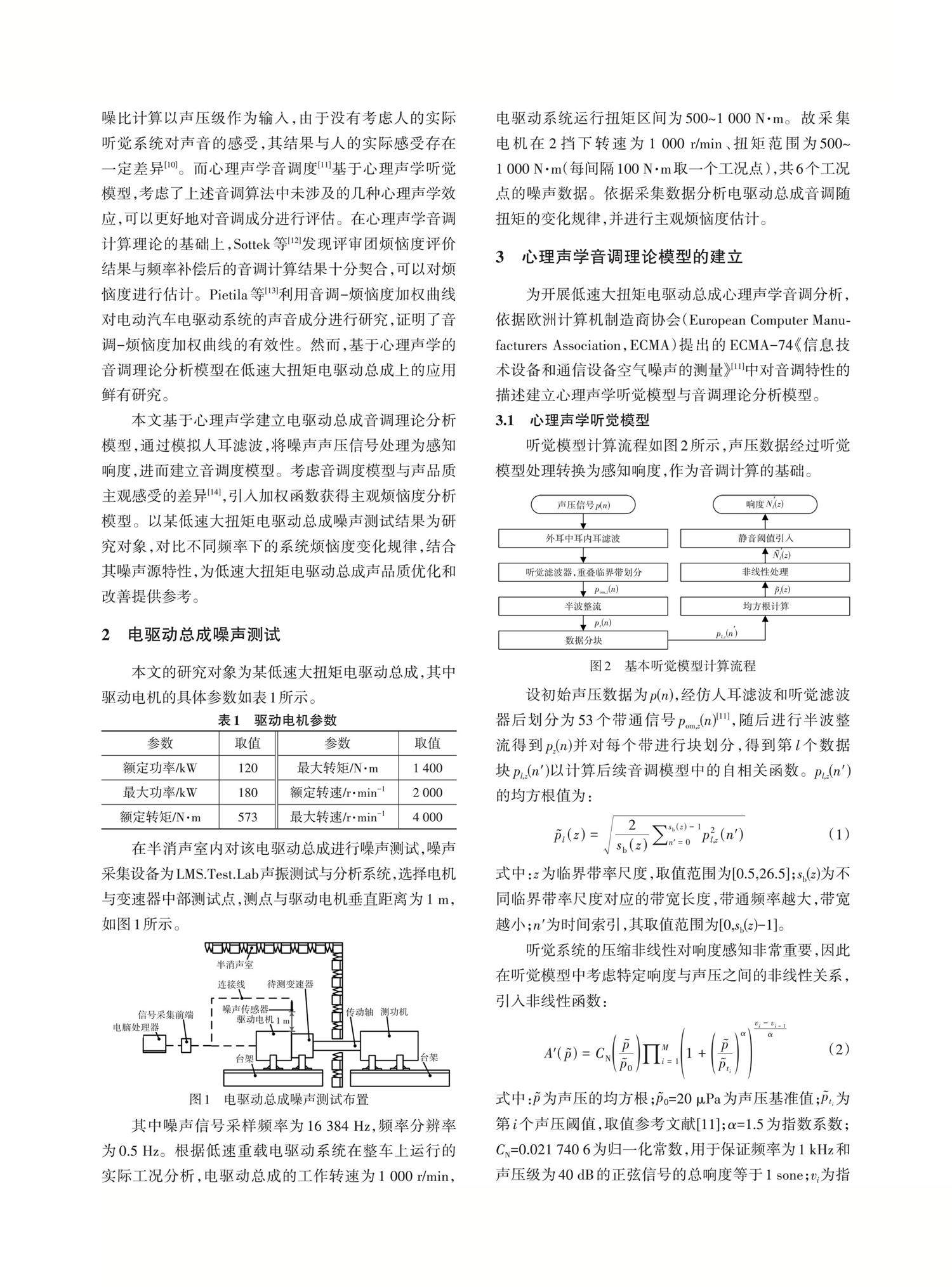
| 基于音调度模型的电驱动总成噪声分析
| 基于音调度模型的电驱动总成噪声分析
-
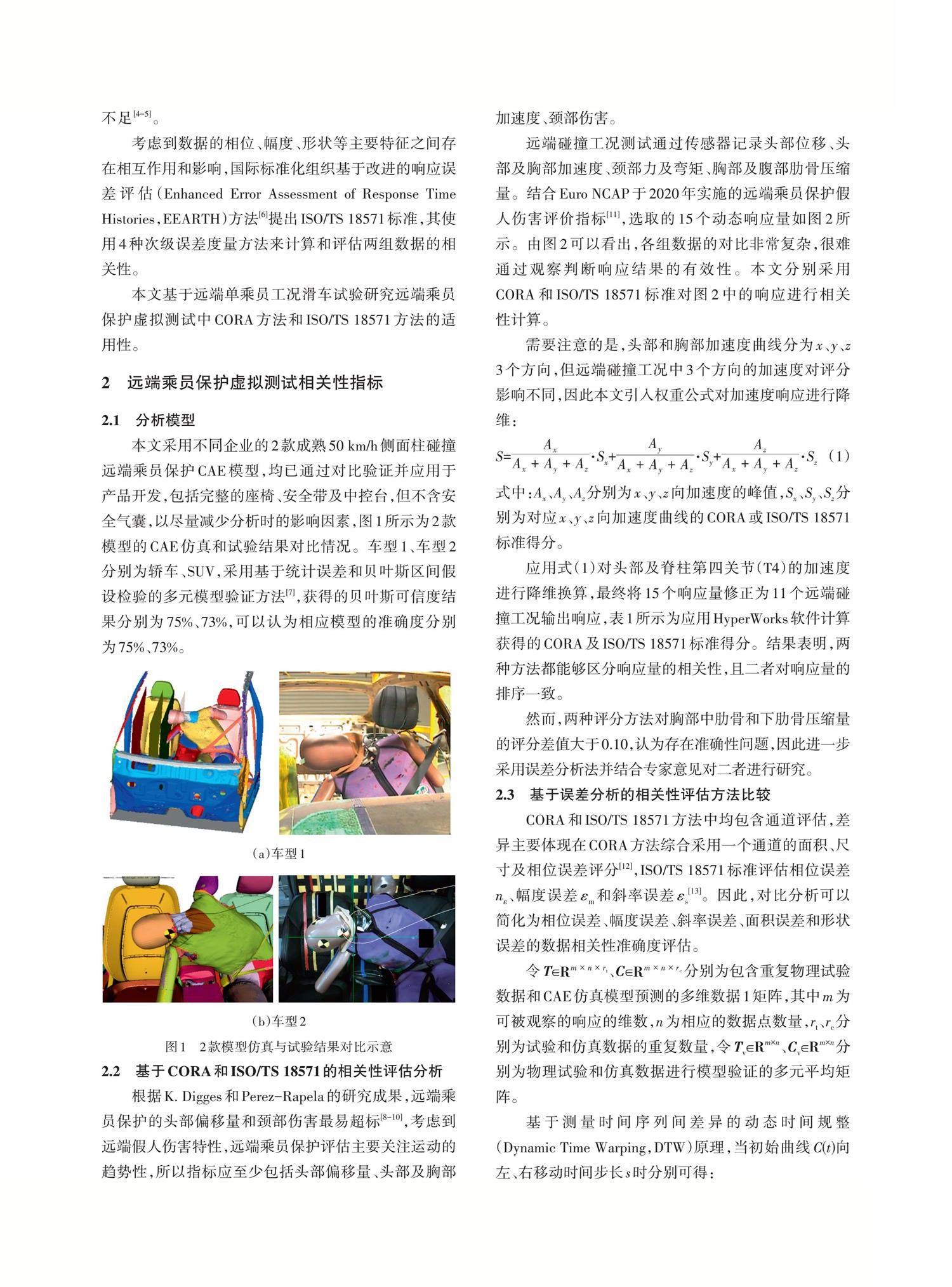
| 远端乘员保护虚拟测试中数据相关性评估方法研究
| 远端乘员保护虚拟测试中数据相关性评估方法研究
-
| 汽车盘式制动器尖叫声仿真研究
| 汽车盘式制动器尖叫声仿真研究














 登录
登录